UNIVERSUMS
HISTORIA | FORMLAGARNA I HÄRLEDNING
| 2012VIII14 | a BellDHARMA production | Senast uppdaterade version: 2018-12-27 · Universums Historia
innehåll
denna sida · webbSÖK äMNESORD på
denna sida Ctrl+F · sök ämnesord överallt i SAKREGISTER · förteckning över alla webbsidor
HÄRLEDNINGARNA TILL FORMLAGARNA — Tabellen
FORMLAGARNAS HÄRLEDNING
TRIGONOMETRISKA | EXPONENTIELLA | LOGARITMISKA
Formlagarna, TextTabell med länkar till utförliga
härledningar [SvEngelska — från originalförfattningarna i sammanställning från
1984]
Formlagarna —
Textbaserad sammanställd tabell i PREFIXxSIN
|
Integralform |
|
TANGENSFORM = derivata |
|||
|
dI/dx |
= |
Dn I |
= |
M |
M; mo´dus (måttet); Derivatan = tangensformen; integranden |
|
|
|
I |
= |
∫ Mdx |
Tangensformen för (derivatan till) I är M; Integralen för M är I |
|
|
|
I |
|
M |
|
DET ÄR OMÖJLIGT ATT FÅ EXAKT PIXELBASERAD
ORIGINALÖVERENSSTÄMMELE VIA WEBBLÄSARE året 2012 — fullkomligt komplett
OMÖJLIGT. Vad kan Programmakrna visa då PER precision? Visa. Ge ETT exempel.
— Det ser ut som att hela verksamheten går ut
på just det: att INTE medverka till något PRECIST; att medvetet SÄNKA
kvaliteterna. År efter år, Det enda som utvecklas är DE INTEGRERADE
KOMPONENTERNA. Sänk skiten.
Formlagarna —
Textbaserad sammanställd tabell med länkar till aktuella härledningar (i detta och övriga
dokument)
|
|
Integralform |
TANGENSFORM |
|
|
|
|
integralen I |
M derivatan y’ |
|
|
|
|
Fundamentalintegraler |
Elementära Derivator |
|
|
|
|
————————— |
————————— |
|
|
|
|
funktion |
derivata
¦ INTEGRAND |
|
|
|
∫ I dx |
I = ∫ M dx |
M |
Beteckning |
Noteringar |
|
trigonometriska: |
|
|
|
|
|
cos |
sin |
– cos . . . . . . . . . . . . . . . . |
|
|
|
–sin |
cos |
sin . . . . . . . . . . . . . . . . |
|
|
|
n–1cos nx |
sin nx |
– n(cos nx) . . . . . . . . . . . |
Dn sin n(P) = –n(P)’cos n(P) |
|
|
–n–1sin nx |
cos nx |
n(sin nx) . . . . . . . . . . . |
Dn cos n(P) = n(P)’ sin n(P) |
|
|
–ln sinx |
tan |
1/sin2 . . . . . . . . . . . . . . |
|
|
|
ln cosx |
cot |
– 1/cos2 . . . . . . . . . . . . |
|
|
|
x asinx – √1–x2 |
asinx |
– 1/√1–x2 . . . . . . . . . . . . |
|
|
|
x acosx + √1–x2 |
acosx |
1/√1–x2 . . . . . . . . . . . . |
|
|
|
x atanx – ln√1+x2 |
atanx |
1/(1+x2) . . . . . . . . . . . . |
|
|
|
x acotx + ln√1+x2 |
acotx |
– 1/(1+x2) . . . . . . . . . . . . |
acot x = atan (1/x) |
|
|
exponentiella: |
|
|
|
|
|
— |
(P)a |
a(P)a–1Dn(P) . . . . . . . . . |
exponentialDerivatan |
|
|
xa+1(a+1)–1 |
xa |
axa–1 . . . . . . . . . . . . . . . . |
exponentialIntegralen, a≠–1 i ∫ I dx |
|
|
— |
(P)n+1/(n+1) |
(P)nDn(P) . . . . . . . . . . . |
exponentialIntegralen, n≠–1 |
|
|
— |
(xa+1)/(a+1) |
xa . . . . . . . . . . . . . . . . . . |
|
|
|
Se partialintegralen |
AB |
A(DnB) + B(DnA) . . . . |
produktDerivatan |
|
|
— |
A/B |
[B(Dn A) – A(Dn B)]/B2 |
kvotDerivatan |
|
|
logaritmiska: |
|
|
|
|
|
— |
e(P) |
e(P)Dn(P) . . . . . . . . . . . . |
exponentDerivatan |
|
|
ezx/z |
ezx |
zezx . . . . . . . . . . . . . . . . . . |
|
|
|
ex |
ex |
ex . . . . . . . . . . . . . . . . . . |
|
|
|
— |
B(P) |
B(P)Dn(P)lnB . . . . . . . . . |
|
se nedan [1] |
|
Bx(lnB)–1 |
Bx |
BxlnB . . . . . . . . . . . . . . . . |
|
samma som ezx, B=ez |
|
— |
ln(P) |
Dn(P)/(P) . . . . . . . . . . . . |
logaritmDerivatan |
|
|
x(ln x – 1) |
ln x |
1/x . . . . . . . . . . . . . . . . . . |
logaritmDerivatan, logaritmIntegralen |
[1] ............................. B=ea; a=lnB; Dn ea(P) = ea(P)[ Dn(aP) = aDn(P) ] = B(P) lnB·Dn(P); [ln e = 1]
Sammanställning — kungsderivatorna från logaritmderivatan
[(P)Q]’ = (P)Q[Q(P)’/(P) + Q’ln(P)] .......................... Allmänna PotensDerivatan
Q=konstant=n [(P)n]’ = (P)n[Q (P)’/(P)] = n(P)n–1Dn(P) ................ ExponentialDerivatan (variabeln i Basen);
P=konstant=e [eQ]’ = eQQ’ln(e)] = eQDn(Q) ................................. ExponentDerivatan (variabeln i Exponenten)
P och
Q, Vilka Som Helst Uttryck, Konstanter
Eller Funktioner.
Dn synkoperar
»derivatan-tangensformen (till, för, av …)»
FORMLAGARNA — från M2001_3.wps
The Form Laws
DESCRIBING — descriptive — WORDS ARE MISSING IN MODERN ACADEMY
MATHEMATICS
IN GENERAL and physics in particular can NOT be described, explained or related
with the available terms, concepts and statements in the modern academic
teaching system. The presentation in UniversumsHistoria
RELATES the math-basics from NOLLFORMSALGEBRAN in ATOMTRIANGELN.
In parallel with the presentation in general, the different aspects are
related, exemplified and discussed wherever possible. The specific equational
parts are listed in The List with detailed references (actual links
to quotes, descriptions, examples and comparisons) for further inspection. The
List includes Physics.
På den svenska översättningsportalen http;//tyda.se/ finns ingenting liknande »räknelagar» på engelska;
— Termen eller begreppet LAG existerar över huvud taget inte i den moderna akademins MATEMATISKA vokabulär:
— Jämför MAC-citatet med MATEMATIKENS 5 GRUNDLAGAR — vi upptäcker lagar, vi kan härleda dem; de framträder ur en helt enkel mönstergrund. Men den finns inte upptagen, ens noterad eller omnämnd, i modern akademi.
— SÅ: HUR beskriver man ÄMNET?
Man får IMPROVISERA — med ände i att speciellt modernt akademiskt meriterade A-studenter som LÄSER ALLT VAD MÄNNISKOR SKRIVER SOM OM DE SJÄLVA STODE HÖGST UPP PÅ INTELLIGENSSTEGEN missar målet i framställningen — vilket SOM VI VET resulterar i att A-studenten ANSER sig vara uppkopplad mot en TOK, tills plötsligt hela draperiet dras undan och sanningen uppdagas:
— Matematikens RELATERADE domäner KAN INTE BESKRIVAS MED HJÄLP AV DEN MODERNA AKADEMINS vokabulär EFTERSOM den TYPEN redan från början (under 1800-talet) utformades i tanken om att MÄNNISKAN HAR SKAPAT MATEMATIKEN (MAC-citatet): MAC uppfinner, inte härleder.
Här tillämpas INTE den fasonen: A-studenterna i modern akademi har ingenting att hämta här. Helt rent.
— RÄKNELAGAR kan då på engelska bli något så töntigt som »RECKONING LAWS» — för att referera de BESKRIVBART härledande grunderna.
Formlagarna i utförliga härledningar [SvEngelska]
Med
fortsättning från NOLLFORMSALGEBRAN
Form laws
Form laws · derivative, differential and integral calculus from The Position Form [POSITIONSFORMEN]
______________________________________________________
Dn y =
y’ = dy/dx = (y0–y)/(x0–x) = (y0–y)/dx — the
position form
— differentialkvoten [»Differential Quotient»]
______________________________________________________
Developing
and Deducing The Form Laws
Instead of
using the position form for
each case when we need to find a specific derivative, it is both much more
convenient and effective to find the derivatives to the elementary mathematical
functions once and for all, write them up in a table [FORMLAGARNA]
and then use these more general achieved results in all kinds of problems. The
following workout shows the general derivatives of the three elementary
functional blocks named exponential (EXP), trigonometric (TRIG)
and logarithmic (LOG) as follows. These are referred to by and connected
with the corresponding hyperlinks in The
General Table.
General
deriving method
The following
derivations will use any of the simplest and most direct available connections
in the above given rank of the equivalents here named the position form. For each form law, the appropriate
connection is written out — clarifying how the deduction has been made. If
nothing else is mentioned, the term y will be used for the functional
result, the term x for the functional variable and the term C for any
arbitrary numeric constant. As far as possible, the integrals corresponding to
the derivatives will be given directly along with each form-law.
In general,
the term (P) will also be used to represent any arbitrary composition of
functions in x — as explicitly denoted, starting from EXP(7).
— The
abbreviation »Dn» is used here as a more clarifying term before the more conventional
»D» for derivative of or derivative
to — as also, in general in
calculus in this presentation, the capital D and others are generally utilized
for general algebraic coefficient purposes.
Coefficients
in Derivatives
1. Dn Cy = C (Dn y)
∫ Cy’
= C ∫ y’
Dn Cy = d(Cy)/dx = C(dy/dx) = C(Dn y)
Single variable Derivative
2. Dn x = 1
∫ 1dx
= x
y = x , y0 = x0
Dn x = (x0–x)/(x0–x) = 1
Constant Derivative — se utförligt i NOLLINTEGRALEN
3. Dn C = 0
∫dC = ∫ 0 = 0
y = y0 = C
Dn C = dC/dx = 0 = (y0–y)/dx = (C–C)/dx = (0)/dx = 0 ;
dy/dx = 0/dx=0 ; dy=0dx ; ∫ dy = ∫
0 dx = 0 ∫ dx = 0·x = 0
Comment:
Note that derivatives
to constants have no relevant meaning IN RELATED MATHEMATICS [NOLLFORMSALGEBRAN]:
constants have no variation. Analytically IN RELATED MATHEMATICS — hence — a derivative to a
constant does not exist. By the same reason constants have no integral
representation — as here clearly derived. Note that this definition cannot be reached in MAC
because of the modern idea defining »Δx=dx»;
RELATED mathematics can not be explained on such a basis.
— See
exemplified thorough description in NOLLINTEGRALEN
where the modern standard is cited and compared.
Sum
Derivatives
4. Dn (x1+ x2+ x3+ … + xn) = Dn(x1) + Dn(x2) + Dn(x3) + …+ Dn(xn)
∫ (x1+ x2+ x3+ …+ xn)dx
= ∫x1dx + ∫x2dx + ∫x3dx + …+ ∫xndx
Dn (x1+ x2+ x3+ … + xn)
= d(x1+ x2+ x3+ … + xn)/dx
=
= d(x1)/dx +
d(x2)/dx + d(x3)/dx + …+ d(xn)/dx
Product Derivative
5. Dn AB = A(Dn B) + B(Dn A)
Derivative to Product from two x-dependent factors
yA = A; y0 = y+dy = A+dA
yB = B; y0 = y+dy = B+dB
y = AB
y0 =
(y+dy)A(y+dy)B
= (A+dA)(B+dB)
= AB+AdB
+ BdA+dAdB
y0 – y = AB+AdB +
BdA+dAdB – AB
= AdB +
BdA+dAdB
= AdB + dA(B+dB)ÛB
= AdB + BdA
;
d(AB)/dx = (y0–y)/dx = (AdB + BdA)/dx
= (AdB/dx) +
(BdA/dx)
= A(dB/dx) +
B(dA/dx)
= A(Dn B) + B(Dn
A)
Dn AB = A(Dn B) + B(Dn A)
(AB)’ = A · B’ +
A’ · B
Comment:
PARTIAL
INTEGRALS — Se utförligt i PARTIELL
INEGRATION
The product
derivative is a highly versatile instrument all categories in calculus. Besides
an excellent tool in verifying integral results, its »reversal» contains the
specially powerful method for integrals in partial integration. Through the
differential equation
d(AB) = AdB + BdA giving
AdB = d(AB) – BdA
we observe
that
AdB = AB’dx , d(AB) = (AB)’dx , BdA = BA’dx , giving
The Partial Integral
∫ AdB = AB – ∫ BdA
The partial
integral, featuring an integral equation, can be applied in two distinct
methodical parts, METHOD 1 and METHOD 2:
METHOD 1 — Without
equivalent :
∫ AdB = AB – ∫ BdA
A given integral form is conceived as the
one part (left) of the rank in the Partial:
∫ AdB = AB – ∫ BdA ........................ partial integral, Method 1
METHOD 2 —
With equivalent :
∫ AdB = AB
— ∫∫ dB dA
A given derivative integral (Þ) is conceived
as one of the Partial’s factors:
∫ AdB = AB – ∫ BdA ........................ partial integral, Method 2
To (highly)
simplify the handling of the partial integral we will in this production use
the general partial chart
∫ f (x) d[·] =
f (x)[·] – ∫ [·]d[f (x)] ........................ Method 1
∫ [·] f (x)
dx = [·] ò f (x)
dx –
∫∫ f (x) dx d[·]
......... Method 2
[·] the unknown, denotes an arbitrary
input-function
[not necessarily,
but generally of the type x]
Se
utförligt med exempel i PARTIELL
INEGRATION
In general
problems of integral calculus, it is more by rule than exception to find use
for either of these two powerful integral methods.
— Both methods
are explained in detail by simple examples in the section PARTIELL
INEGRATION.
Quotient Derivative
6. Dn A/B = [B(Dn A) – A(Dn B)]/B2
Derivative to Quotient between two x-dependent factors
yA = A; y0A = yA+dy = A+dA
yB = B; y0B = yB+dy = B+dB
y = A/B
y0 – y =
(y+dy)A/(y+dy)B – A/B
= (A+dA)/(B+dB)
– A/B
= [B(A+dA) –
A(B+dB)]/B(B+dB)
= [BA+BdA
– AB – AdB]/B(B+dB)
= [BdA –
AdB]/B(B+dB)ÛB
= [BdA–AdB]/B2 ;
d(AB)/dx = (y0–y)/dx = (1/dx)[BdA – AdB]/B2
= [B(dA/dx)
– A(dB/dx)]/B2
= [B(Dn A) –
A(Dn B)]/B2
Dn A/B = [B(Dn A) –
A(Dn B)]/B2
Exponential
Derivative
7. Dn (P)a = a(P)a–1Dn(P)
a–1=m ; Dn (P)m+1
= d(P)m+1/dx = (m+1)(P)mDn(P) ;
Exponential Integral
∫(P)mDn(P)dx = (P)m+1/(m+1) ; m ≠–1
(P) = (Axk + Bxl + Cxm +…)
y = (Axk + Bxl + Cxm +…)a
= (P)a
y = (P)a , y0 = (P)0a
(P) = X
y = Xa , y0 = X0a
dy/dx = [X0a – Xa]/dx = [[X + dX]a – Xa]/dx
(X+dX)a inserted for (a+b)n in the binomial theorem:
Xa + Xaa(dX/X) + Xaa(a–1)(dX/X)2/2! + Xaa(a–1)(a–2)(dX/X)3/3!
+ Xaa(a–1)(a–2)(a–3)(dX/X)4/4! + … + (dX)a
Subtracting Xa and then dividing by dx, only one term
can eliminate dx, the second in the rank above, the Xaa(dX/X). The remaining is hence :
dy/dx ![]() Xaa(dX/dxX)
= aXa–1 dX/dx = aXa–1 Dn X dx/dx
= aXa–1 Dn X ;
Xaa(dX/dxX)
= aXa–1 dX/dx = aXa–1 Dn X dx/dx
= aXa–1 Dn X ;
Dn (P)a = a(P)a–1 Dn (P)
NOTE on transition
from positions (dx) to values (Δx) — see also in DERIVATA
OCH INTEGRAL, dx ![]() 0:
0:
— In MAC there is no distinction between Δx (IN RELATED MATHEMATICS a difference) and dx (IN RELATED MATHEMATICS a differential=position=point) — se quote »Δx=dx» — meaning »general chaos» in MAC in defining calculus basics: not one person on Planet Earth understands — can EXPLAIN to others — modern academy calculus; guaranteed.
— In RELATED MATHEMATICS this »difficulty» is eliminated by observing the natural properties of positions (differentials as part of zero=point=nothing) and values (intervals=differences to zero). See detailed definitions and descriptions in NOLLFORMSALGEBRAN, explicitly in MÄSTARLOGIKENS HUVUDSATS: there are no limitless quantities: points (0) does not add to intervals.
Exponential
Derivative, simple case of (7) with (P)=x
8. Dn xa =
axa–1
Exponential Integral
∫ xm dx = xm+1/(m+1) ; m ¹ –1
Trigonometric functions in
PREFIXxSIN
We use the Series for sine and cosine [Sinus&CosinusSERIERmed
i] [Sinus&CosinusSERIERutan
i], a in radians.
sin a = 1 – a2/2! + a4/4! – a6/6! + a8/8! – a10/10! + …
cos a = a – a3/3! + a5/5! – a7/7! + a9/9! – a11/11! + …
Sine Derivative
1. Dn sin = –cos
∫ –cosx dx = sin x
; ∫ cosx dx = –sin x
Derivation term by term via form law EXP4&EXP8 in sine series gives –cos:
0 – 2a/2! + 4a3/4! – 6a5/6! + 8a7/8! – 10a9/10! + … ;
– a + a3/3! – a5/5! + a7/7! – a9/9! + …
Cosine Derivative
2. Dn cos = sin
∫ sinx dx = cos x
Derivation term by term via form law (EXP4&EXP8) in cosine series gives sine:
1 – 3a2/3! + 5a4/5! – 7a6/7! + 9a8/9! – 11a9/11! + …
1 – a2/2! + a4/4! – a6/6! + a8/8! – a9/10! + …
Angle Coefficient Derivatives, Sine and Cosine
3. Dn sin na = – n(cos na)
∫–n(cos nx) dx = sin nx ; n∫(cos nx) dx = –sin
nx
Dn
cos na = n(sin na)
∫ n(sin nx) dx = cos nx
By example from the sine series, we study how a multiple n of the angle a
duplicates out to a constant coefficient on derivation (The cosine
derivation then extracts directly by mind) we use EXP4&EXP8;
sin na = 1 –
n2a2/2! +
n4a4/4! –
n6a6/6! +
n8a8/8! –
…
Dn sinna = 0 –
n2a + n4a3/3! – n6a5/5! +
n8a7/7! –
…
Dn sinna = – [n2a – n4a3/3! + n6a5/5! –
n8a7/7! +
…
= –n[na – n3a3/3! +
n5a5/5! –
n7a7/7! +
…
= –n[cos
na]
MORE GENERALLY if a is any composite function of x as (P) it
holds that
Dn sin n(P) = – n Dn(P) cos
n(P)
Dn cos n(P) = n Dn(P) sin n(P)
exemplified in development through
sin n(P) = 1 –
n2(P)2/2! +
n4(P)4/4! –
n6(P)6/6! +
n8(P)8/8! –
…
Dn sinn(P) = 0 –
n2(P)Dn(P) + n4(P)3Dn(P)/3!
– n6(P)5Dn(P)/5!
+ n8(P)7Dn(P)/7!
– …
Dn sinn(P) = – [n2(P)Dn(P) – n4(P)3Dn(P)/3!
+ n6(P)5Dn(P)/5!
– n8(P)7Dn(P)/7!
+ …
= –nDn(P)[n(P) – n3(P)3/3! + n5(P)5/5! –
n7(P)7/7! +
…
= –nDn(P)[cos
n(P)]
In the article
THE TANGENT
FORMS IN TRIGONOMETRY the derivatives for tangent and
cotangent have already been derived (a summation is given below). We will
however rejoin through an alternative way in using the earlier derived form law
EXP6 to show a derivation more
consistent (and easier) with this section presentation.
Developing the sine function (II)
4. Dn tan = 1/sin2
∫ 1/(sinx)2 dx = tan x
We apply EXP6 ; Dn A/B = [B(Dn A) –
A(Dn B)]/B2,
tan = cos/sin ;
Dn tan = Dn cos/sin =
[sin Dncos – cos Dnsin]/sin2
= [sin2 +
cos2]/sin2 =
1/sin2
Adding the angle coefficient n to x, we can follow the derivation above
using TRIG3 and see that the result becomes
Dn tan nx = n/(sin nx)2
5. Dn cot = Dn 1/tan = –1/cos2
∫–1/(cosx)2 dx = 1/tanx
We apply EXP6 ; Dn A/B = [B(Dn A) –
A(Dn B)]/B2,
Dn 1/tan = Dn sin/cos =
[cosDnsin – sinDncos]/cos2
= [–cos2 –sin2]/cos2 =
–1/cos2
Adding the angle coefficient n to x, we can follow the derivation above
using TRIG3 and see that the result becomes
Dn cot nx = –n/(cos nx)2
Arkusfunktionernas Tangensformer
Arc
functions Tangent forms
These derivations
appear illustrated in THE TANGENT
FORMS IN TRIGONOMETRY. We will here give a corresponding
short strict formal survey of these mentioned more detailed derivations.
By relating the angle-zero index for the
tangent forms sinx, –cosx, –sinx, and cosx to negative y-axis,
respectively 1/–sinx, 1/cosx, 1/sinx and 1/–cosx, and additionally
express all x as Arc sine [asin] and Arc cosine [acos]
according to respectively asiny, acosy, asiny and acosy, and then finally
rotate the coordinate system positively by an exact quarter of a turn along
with shifting the terms xy respectively accordingly as asin–x,
acosx, asinx and acos–x, the expressions are
directly obtained for the arc tangent functions as [Dn asin–x =
1/√1–x2], [Dn acosx = 1/√1–x2],
[Dn asinx = –1/√1–x2] and [Dn acos–x = –1/√1–x2].
6. Dn asin x = –1/√1–x2 ;
y = asin x ; Dn y = –1/siny = –1/√1–[cos y]2
∫–(1/√1–x2) dx = asin x
With an angular coefficient n
[See also The
derivatives with angle coefficient] we find
Dn asin nx = –n/√1–(nx)2
7. Dn acos x = 1/√1–x2 ;
y = acos x ; Dn y = 1/cosy = –1/√1–[sin y]2
∫(1/√1–x2) dx = acos x
With an angular
coefficient n
[See also The
derivatives with angle coefficient] we find
Dn acos nx = n/√1–(nx)2
Adopting the
same method as in (6) and (7) above, the tangent forms for atan and acotan are
obtained as
8. Dn atan x = 1/1+x2
;
= 1/[1+(tan y)2
∫(1+x2)–1 dx = atan x
With an angular coefficient n
[See also The
derivatives with angle coefficient] we find
Dn atan nx = n/1+(nx)2
9. Dn acot x = –1/1+x2
;
= –1/[1+ (cot y)2]
∫–(1+x2)–1
dx = acot x
= atan (1/x)
With an angular coefficient n
[See also The
derivatives with angle coefficient] we find
Dn acot nx = –n/1+(nx)2
Logarithmic functions
See INTRODUCTION with the Deduction of The Natural Logarithm
Logarithmic functions
Continuing
on Logarithmic functions
REGULAR DERIVATIONS logarithmic functions
Exponent
Derivative, simple case
1. Dn ex = ex
Exponent Integral:
∫ ex dx = ex.
From the Deduction
of The Natural Logarithm we have the exponent of the natural logarithm as
(1+1/∞)∞x = (1+x/∞)∞= ex
= 1 + x + x2/2! + x3/3! + x4/4! + x5/5! + … + xm/m!
Derivation term by term through EXP4&EXP8 gives
Dn ex = 0 + 1 + 2x/2! +
3x2/3! + 4x3/4! + 5x4/5! + …+ mxm–1/(m–1)!
Dn ex = 1 + x + x2/2! + x3/3! + x4/4! + …+ xm–1/(m–1)! = ex
As we see, the result is just pushed net intact!
Exponent Derivative, natural logarithm
2. Dn
e(P) = e(P)·Dn(P)
Exponent Integral,
general (i.e., regular):
∫ e(P)·Dn(P) dx = e(P).
Superseding x by (P) in the ranks of LOG1
above gives
e(P) = 1 + (P) + (P)2/2! + (P)3/3! + (P)4/4! + (P)5/5! + …+ (P)m/m!
Derivation through EXP4&EXP8 gives
Dn e(P) = 0 + Dn(P) + 2(P)Dn(P)/2!
+ 3(P)2Dn(P)/3! + …+ m(P)m–1Dn(P)/m!
Dn e(P) = Dn(P)[1 + (P) + (P)2/2! + (P)3/3! + (P)4/4! + …+ (P)m/m!]
The part within square brackets has the form e(P), hence Dn e(P) = Dn(P)·e(P)
As a numeric constant can be moved freely between the parts of a rank [see EXP1] we receive for the special case
where Dn(P)=m=constant
Dn e(P)Dn(P)–1 = e(P)
,
∫ e(P) dx = e(P)Dn(P)–1 ;
i.e.,
∫ emx dx = emx/m
Exponent Derivative, general logarithm — se HÄRLEDNINGEN
TILL e
3. Dn
Bx = BxlnB
∫ BxlnB dx = Bx
B = em ; m
= lnB ; Bx
= emx
Dn Bx = Dn emx = [emx·Dn
mx], See LOG2, = emx·m
Dn Bx = emxm = BxlnB
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
LOGARITHM
FUNCTION’s x-CONSTANT
a = (lnB)–1
From Proof
of (1+1/∞)∞=e in Deduction
of The Natural Logarithm we remind the tangent form to the logarithm function as
k = y/a = Bx/a, with a as the constant on the x-axis ;
Through the
form law in (3) above we then receive
k = Dn Bx = BxlnB
1/a =
lnB ;
a = 1/lnB
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Fixing the details
As earlier related in MATHEMATICS
FROM THE BEGINNING chapter one (see The
Reckoning Laws, The
basic logarithm laws) we have through the connections
Bx=P, x = BlogP (here
simplified as BlogP) that BBlogP = P
Correspondingly we have through
ex = (P), x = ln P, that eln(P) = (P)
With this result we supersede the exponent to e in our recently
derived exponent derivative LOG2,
Dn e(P) = e(P)·Dn(P), by ln(P) giving
Dn eln(P) = eln(P) Dn ln(P)
As the equivalent to eln(P)
is (P) we use this
equality in the right part rank above which then gives us the form law
4. Dn
(P) = (P)·Dn ln(P) = d(P)/dx = (P)d[ln(P)]/dx
Expressed in Dn ln(P), this LOG(4) gives us the highly context central
logarithmic form law
Logarithm Derivative
5. Dn ln(P) = Dn(P)/(P)
We observe that in introducing a constant factor C to the (P)-function as
(PC) we receive exactly the same result
Dn ln(PC)
=
Dn(PC)/(PC) = C ·
Dn(P)/(PC) = Dn(P)/(P)
That is: constant factors are completely ignored by logarithm
derivatives;
| Special application; R = √(x2+a) ; (P) = x+R ;
| Dn R, see EXP7, = Dn(x2+a)1/2 = (1/2)(x2+a)–1/22x
= xR–1 ;
| Dn ln(x+R)
= (P)’/(P) = (1+xR–1)/(x+R)
= R–1(R+x)/(x+R) = R–1 .
| ∫ R–1dx = Dn ln(x+R) , R
= √(x2±a)
Continue
Dn(P)/(P) = [d(P)/dx]/(P) ; Dn ln(P) dx = d(P)/(P) ;
Logarithm Integral, (special)
∫ d(P)/(P) = ∫ Dn ln(P) dx
= ∫ d[ln(P)] =
ln(P)
Applying the constant-independency character above with C as constant yields
the highly original even more general logarithm integral
∫ d(P)/(P) = ∫ d[ln(P)] =
ln(PC)
whereas Dn ln(PC) = (PC)’/(PC) = (P)’/(P).
i.e., the logarithm integral solution generates an admittance of conditions not explicitly included in the integrand (the default
is 1 in the solution).
NOTE. The more truly regular term
Logarithm Integral is found by the following development [The integral to LOG5 as ”logarithmic” more appeals to
the general group in the form laws we are studying than the actual expression;
compare the following].
Advanced exercise (writing mixed Dn(P) and (P)’):
In applying the Product Derivative EXP5 on
LOG5 through the function
(P)’ln(P) we receive
(P)’ln(P) = [(P)ln(P)]’ = (P) · Dn ln(P) + Dn (P) · ln(P)
;
= Dn(P) + Dn (P) · ln(P) ;
(P)’ln(P) – Dn(P) = (P)’ln(P) ;
Dn[(P)ln(P) – (P)] = Dn(P) · ln(P) ; Hence
Tangent-Logarithm Integral, advanced (regular)
∫ Dn(P)
· ln(P) dx = (P)
· ln(P)
– (P)
Especially
for (P)=x we receive the simple-case
6. Dn ln x =
1/x
d(ln x)/dx = 1/x ;
d(ln x) = dx/x ;
∫ dx/x
= ∫
d(ln x) = ln x
On behalf of the entirety we must here and via LOG5
note the similarity with the exponential form law EXP7. As the latter is
Dn(P)a = a(P)a–1Dn(P) = a(P)aDn(P)/(P)
we receive from this rank out of its first and last parts, and thereby
the equality with LOG5,
7. Dn(P)a/a(P)a = Dn(P)/(P) = Dn ln(P)
Hence with the middle link common to the both functional classes
exponential and logarithmic functions. With these details we have made the
arrangements and can return to physics in the main context.
Of the form laws above, as recently noted, the ranks around LOG5 are of vital and immense
significance to (the functional forms within) physics. If we plainly formally
incept a departure from a mathematical expression of the form
f (t) time function
(= C t), C an arbitrary
(optimal) proportionality coefficient
t actual time
a top or limiting value
(”my roof” to the physical quantity)
F actual
corresponding functional momentary value with t as the functional
variable
we receive
If we now apply (9) for ln(P) into (4) [= Dn(P) =
(P) · Dn ln(P) ] we
receive through the equality Dn ln(P) = Dn f (t)
number (4) on the form
(10) Dn (P)
= (P) · Dn f (t) ....................... (P)C
In this equality Dn f (t), with
f (t) = C t from (8), gives us Dn C t = C [see EXP1&EXP2], that is Dn f (t)=C. Hence
Dn(P) = (P)C from
no(10). For Dn(P) = Dn(a±F) from no(8) we obtain by the same
application of the sum derivative EXP4
that
Dn (a±F) = Dn a ± Dn F
As earlier, a is a constant which from no(8) gives in total
Dn (a±F) = 0 ± Dn F = Dn(P), = ±dF/dt.
Important
As we see of this, which is important to observe although seemingly tiny
in its own existence, the polarity of the quotient dF/dt
follows from the polarity of F as dF/dt just in another
expression of the F-derivative. In
explicit terms we hence must observe that
± Dn F = dF/(±dt)
In other words: the time factor receives the polarity of F. To simplify
the proceeding derivations we now, with this decisive condition in mind, can
ignore the explicit inclusion of the ±-sign in our expressions and then
later on resume by giving the more exact formula. We hence have
Dn (a+F) = Dn F
= Dn(P), = dF/dt.
Compiling all this together we have, in other words,
= Dn F
...............
= dF/dt
................ dF/dt
= F’ ; dF/F’ =
dt
= (a+F)C
= (P) · Dn ln(P)
As we see, the equivalents marked above at the rightmost is absolutely
identical to the differential quotient [The
Position Form] outlined and discussed from the beginning
of this workout; No mess.
From these central ranks, number 3 and 4 from top of (11), we now
receive the derivative equation
or the variant [VARIANT]
(12) dF/dt
= (a+F)C [ = (a+F)’
= (P)’ = (P) f ’(t) = F’ ]JUST SUMMING
................................................................ take some time to check that things fit
with the differential equation
dF/(a+F) = C dt
That’s it.
The only thing that remains now — when we have mounted the whole
building and got all the furniture and the computers in at all their proper
places and the kitchen filled with good bread and fresh tomatoes and lots of
good tea — is to paint the house with energy. That is, to apply an integral
to the whole construction.
The
solution to the differential equation
PREPARING FOR PRACTICAL PHYSICS
Object: dF/(a+F)
= C dt
AS WE SEE from all integrands of the type dF/(a+F) with
the differential equation
dF/(a+F) = Kdt
there is via the logarithm derivative LOG5,
Dn ln(P) = Dn(P)/(P), given the corresponding (separate)
integrals, each for each side of the rank, as
F t
0 0
We observe for exact clarity that Dn(a+F)=Dn(F), meaning the same as d(a+F)=d(F)
so that the principal Logarithm Integral from LOG5,
∫ d(P)/(P)=ln(P), still holds
independent of whether a separate additive constant is present or not in the
integrand’s denominator. The general interpretation of the integral terminology
here used is explained in INSÄTTNINGSGRÄNSER.
F F
∫ dF/(a+F) = [ ln(a+F)
] = ln(a+F)
– ln(a+0) =
0 0
= ln(a+F) – ln(a)
Recall the logarithm
laws;
= ln (a+F)/a = Kt
The solutions by the exponent expressions in total then become
aeKt = a+F
aeKt – a = F ;
If the integration in the F-integral instead is taken between F and any
arbitrary starting value b, [we then use the constant-independency quality
in LOG5,
Dn ln(PC) = Dn(PC)/(PC) = Dn(P)/(P) ]
F
(15) ∫ dF/(a+F) = ln(a+F)
– ln(a+b) = Kt =
b
= ln[(a+F)/(a+b)]
the solution in fundamental
integrals in total for this more general case becomes
eKt = (a+F)/(a+b)
(a+b)eKt = a+F
(a+b)eKt – a = F = aeKt + beKt – a
= aeKt – a + beKt = a(eKt – 1) + beKt ;
We observe that as the b-factor belongs to the F-factor then also the
polarity of b follows from the polarity of F as well as also the polarity of t follows
from the polarity of F, as earlier explicitly explained (see Important). That
is, the F-polarity determines the two other actual factor-poles bt.
This more general case with an offset factor b then corresponds
to exactly the same differential equation as without the b-factor
according to the observed constant-independency property of LOG5. That is,
ln[(a+F)/(a+b)]
”=” ln[(a+F)],
See Note below
as both these give the same derivative
F
——— = Dn ln[(a+F)/(a+b)]
= Dn ln[(a+F)]
a+F
For the b-factor [the entire (a+b)-parenthesis] that is:
its condition cannot be
formulated or expressed in the integrand
without changing the entire status of the expression itself.
NOTE:
We observe the trap: the two expressions on each side of the marked ”=” cannot compile directly as equal
as this (in general) would give us the obscure result
(a+F)/(a+b) = (a+F) ; 1 =
(a+b)
This obviously tells us to pay extra attention in handling derivative
equations so the end result will not introduce implied, erroneous equalities.
Resuming;
ALL EQUATIONS POSSIBLY COMPILABLE (possible to compile) on the form of derivative-equations
or variants [conv. differential equations] as
y’ = K(a±y)
; y’ – K(a±y)
= 0 ; y’ – Ka + (–+)Ky
= 0 ;
y’ – ±Ay = B simplified y’ – Ay – B = 0
[i.e., all processes traceable through a function of time
and onto the above elementary first degree variable (a±F) with F=
f (t ) = y]
hence have the differential
equation [conv. differential form]
d(F)/(a±F) = Kdt
with the solution
Main Integral of Mathematical Physics [MIMP (or possibly MainMap) for further reference, or LOG(18)]
(18) ±F = a(e±Kt
– 1) ± be±Kt ; formally compare
±F = (a±b)e±Kt – a y = C emF(x) – n
F functional value (any physical quantity)
a top value of F
(constant)
b start value of F
(constant)
K
proportional time-constant
t time
polarities ± are determined all through by that
for F
Vinkelsummateoremet — fullständiga 14 sambanden
Trigonometriska Baskartan från 1984
Vinkelsummateoremet —
fullständiga 14 sambanden

TRIGONOMETRINS 14 GRUNDSAMBAND [från Originalet från 1984] MED
Praktiskt tillämpningsexempel
på trigonometriska funktionerna
SAMBANDEN FÖR ADDERANDE VINKLAR i PREFIXxSIN
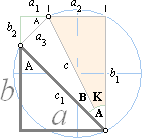
Genom att teckna upp rätvinkliga
trianglar i cirkeln, kan de trigonometriska
sambanden för vinkelsummeringar härledas ur de enkla grundfunktionerna.
HL betecknar HögerLed (VL VänsterLed). Vi
använder de enkla trigonometriska grundrelationerna med rätvinkliga triangelns
kateter ab och hyposidan c med vinkeln φ (Grek. fi, j) och vinkelprefixet a/c=sinj, b/c=cosφ, b/a=tanφ=(b/c)/(a/c), samt Pythagoras
sats a2+b2=c2 som ger
a2/c2 + b2/c2=1=(a/c)2
+ (b/c)2=sin2j+cos2j (som vi
ofta skriver förenklat sin2+cos2=1).
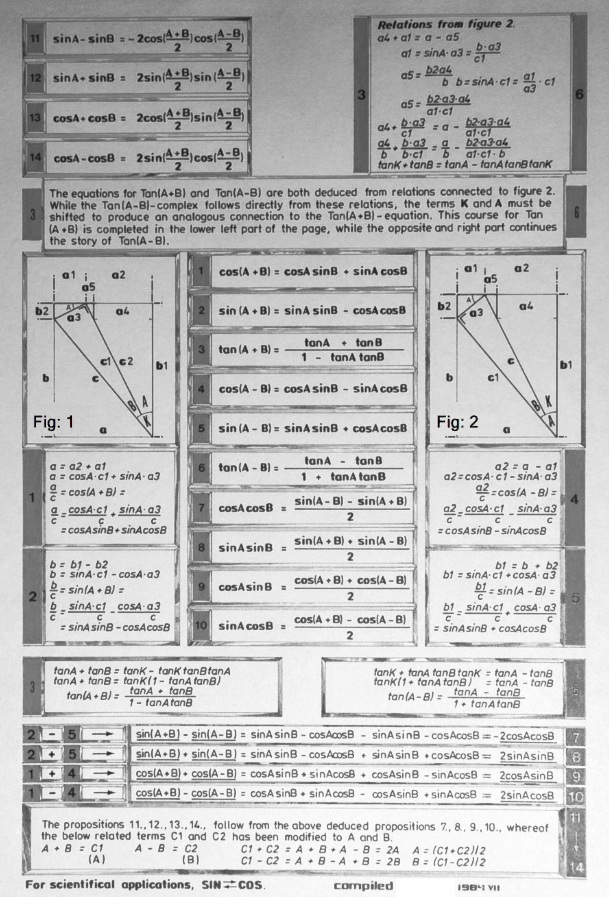
Figuren visar relationerna
|
|
a2 |
= a – a1 = cosA·c1 – sinA·a3 |
b1 |
= b + b2 = sinA·c1 + cosA·a3 |
|
|
|
a2/c |
= cos(A–B) |
b1/c |
= sin(A–B) |
|
|
|
a2/c |
= cosA·c1c–1 – sinA·a3c–1 |
b1/c |
= sinA·c1c–1 + cosA·a3c–1 |
|
|
|
a2/c |
= cosA·sinB – sinA·cosB |
b1/c |
= sinA·sinB + cosA·cosB |
|
|
cos(A–B) |
= cosAsinB – sinAcosB
|
sin(A–B) |
= sinAsinB + cosAcosB |
(5) |
|
|
|
|
sin–B=sinB, cos–B=–cosB ; |
← |
projektionssymmetrierna |
|
|
cos(A+B) |
= cosAsinB + sinAcosB |
sin(A+B) |
= sinAsinB – cosAcosB |
(2) |
Beteckningarna (1)(2)(4)(5) refererar till ordningstalen i de totalt 14 sambanden, vidare nedan.
som tillämpade på ovanstående enhetscirkeln
med r=1=r1=r2 med
tillhörande x=sin och y=cos direkt ger komponenterna
y = y1x2
+ x1y2 (1)(2) x = x1x2 – y1y2 ......... vinkelsumman
y = y1x2
– x1y2 (4)(5) x = x1x2 + y1y2 ......... vinkelskillnaden
Enhetscirkeln med r=1=r1=r2 medför att x/(HL)=y/(HL)=r/r1r2=1, (HL) respektive högerdelar.
Man har alltså ekvivalenterna totalt speciellt
för sambanden i tabellen markerade (1) och (2) varur vinkelsummateoremet ges enligt
x=(x1x2–y1y2) ; y=(y1x2+x1y2) ; r=r1r2(=)Δ1+Δ2
................ vinkelsummateoremet
summerande vinklar betyder multiplicerande hypomängder
Med tan=cos/sin,
analogt tan=y/x, får man direkt motsvarande tangenssamband via
(1)(2)
y/x =tan=
(y1x2+x1y2)/(x1x2–y1y2)=(y1x2+x1y2)/[x1x2(1–tan1tan2)]=(y1/x1+y2/x2)/[1–tan1tan2]
=(tan1+tan2)/[1–tan1tan2]
(3) tan(A+B) = (tanA + tanB)(1 – tanAtanB)–1
och via (4)(5)
som endast har ombytta tecken
(6) tan(A–B) = (tanA – tanB)(1+ tanAtanB)–1
Förklaring:
(7) cosAcosB = 2–1[–sin(A+B) + sin(A–B)]
............... (2)–(5)=(7)
(8) sinAsinB = 2–1[–sin(A+B) + sin(A–B)]
............... (2)+(5)=(8)
(9) cosAsinB = 2–1[–cos(A+B) + cos(A–B)]
............... (1)+(4)=(9)
(10) sinAcosB = 2–1[–cos(A+B) – cos(A–B)]
................ (1)–(4)=(10)
Med A+B=C1 och A–B=C2 som ger A=(C1–C2)/2
och B=(C1+C2)/2,
varefter C1 och C2 sättes respektive A och B, ges från 7-10 sambanden 11-14.
(11) sinA–sinB = –2cos[(A+B)2–1]cos[(A–B)2–1]
(12) sinA+sinB = –2sin[(A+B)2–1]sin[(A–B)2–1]
(13) cosA+cosB = –2cos[(A+B)2–1]sin[(A–B)2–1]
(14) cosA–cosB = –2sin[(A+B)2–1]cos[(A–B)2–1]
Med
reservation för eventuella skrivfel och överföringsfel.
Från
originalarbeten i sammanställning 1984 VII,
i vidare
bearbetning 2003III14 | 2012VIII16 för UNIVERSUMS HISTORIA.
Trigonometrins tangensformer — från M2001_3.wps
TRIGONOMETRINS TANGENSFORMER från elementära
samband
The tangent forms in
trigonometry
THE TANGENT
FORMS IN TRIGONOMETRY in PREFIXxSIN
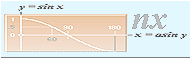
Developing
the sine function
(4) (2) (1)
(3)
–sin x cos x sin x –cos x
–sin x
y=sin(180–x) y=sin(90–x) y=sin x y=sin(90+x)
(1) sin x
(2) sin(90–x) = cos x
(3) sin(90+x) =
–cos x
(4) sin(180±x) = –sin x
By using the
elementary trigonometric connections on the given sine wave function
(1) y = sin x
we receive the
other significant expressions from the given one by simply relating the y-axis
in consecutive steps of 90 degrees. The figure above shows the resulting
equative expressions. From these basic forms is derived the same systematic
order for the corresponding derivatives. The primary form with Dn sin = –cos
shows a corresponding angular displacement in 90 degrees steps according to the
former order as
(1.1) Dn sin x =
–cos x
(2.1) Dn cos x = sin x
(3.1) Dn –cos x = –sin x
(4.1) Dn –sin x =
cos x
The
tangent-forms for tangent and cotangent
(5) Dn tan = sec2
(6) Dn cot = –cosec2
If we return
to the primary tables in trigonometry, number [6] in the composite forms,
tan(A–B)
= (tanA – tanB)/(1+ tanAtanB)
namely
re-written on the form
(1+tanAtanB)=(tanA–tanB)/tan(A–B)
we soon see
the likeness with the position form
itself, k = dy/dx = (y0–y)/(x0–x).
With
y0 = tan x0 and y
= tan x we receive
k = d(tanx)/dx = (tanx0 – tanx)/dx accordingly
(tanx0 – tanx)/tandx = 1+ tanx0tanx
Explanation:
If we recall
the characteristics of the circle where the angle x is measured in
radians, we see that the logical interval Δx of the angle x
equals the tangent of Δx. As the aspect of Dx also is the aspect of the entire angle x, i.e., the ”line” of
the arc as the radius of the circle, we arrive at the position (tanx)/∞
with the same meaning as the position x/∞, analogously
tandx = dx.
Then we
receive
Dn tanx = (tanx0 – tanx)/dx = 1+ tanx0tanx ![]() 1+
(tanx)2
1+
(tanx)2
From the
primary relations we know that this expression also has the equivalent
(sec x)2 = 1/(sin x)2. We then have
found (5) that Dn tanx = (sec x)2.
If we continue
this investigation by inverting the tangent in number [6] in the composite
forms, same as above, we find the only difference to be a negative result.
We put
K = (a–b)/(1+ab) and receive
(1/a – 1/b)/(1+1/ab)
= [(b–a)/ab]/[(ab+1)/ab]
= (b–a)/(1+ab)
= –K
For [6] in the
composite forms with its right part of the rank as reciprocal tangents it
hence counts that
–tan(A–B) = (cotA–cotB)/(1+cotAcotB)
= – (tanA – tanB)/(1+ tanAtanB) ;
(cotA–cotB)/tan(A–B)
= –(1+cotAcotB).
Let us thereby
consider the case with the derivative to
y = cotx = 1/tanx. We put y=cotx, y0=cotx0 so that we get
k = dy/dx =
(y0–y)/(x0–x)
k = d(1/tanx)/dx = d(cotx)/dx
= (cotx0 – cotx)/dx
As we see,
these ranks are analog to the extract above,
(cotA – cotB)/tan(A
– B) = – (1+ cotAcotB), so that we can put
(cotx0 – cotx)/tan(x0
– x) = – (1+
cotx0cotx) = d(cotx)/dx.
We hence have that
(cotx0 – cotx)/tan(dx) = – (1+ cotx0cotx). Similar to the previous order it
also holds here that
tan(dx)=dx
which then gives us the equivalent to the position form for cotx above
according to
(cotx0 – cotx)/dx = – (1+ cotx0cotx)
![]() –
[1+ (cotx)2]. From the primary
trigonometric relations we now know that
–
[1+ (cotx)2]. From the primary
trigonometric relations we now know that
1+ (cot)2 has the equivalent 1/cos2=(cosec)2. We then have found (6) that
Dn cotx = –[1+
(cotx)2] = –(cosec x)2.
As we see, the
orders hold tan-sec and cot-cosec so it is comparatively easy to handle and
remember.
From these received
connections, it is possible to reach the corresponding cyclometric tangent form
expressions.
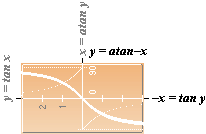
The arc functions
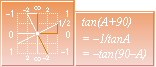
By conceiving
the basic forms recently derived, rotated positively 90 degrees, a change is analogously
made to the tangent forms from tanA to –1/tanA as is shown
in the small illustration here on top.
By adopting
the expressions to the rotation attaching the xy-axes, one receives the
corresponding modified functions. As we know the tangent form to the functions
sine, cosine and tangent, the tangent forms can be deduced for the
corresponding arc functions by this method. The given tangent form hence is
transformed through
·
change of sign
by positive rotation a quarter of a turn
·
inverting,
angular index changes from A to 90–A (see illustration above)
·
(x ; y)
replaces by (y ; –x)
[Normally
you need some practice to immediately see the point in this description.
If you don’t get it ”right ahead”, don’t despair: you are in good company; You
don’t know how many times I had to walk things over, again and again and again
in seemingly endless circles, before I really got to the point].
In the
following workout, I will just show the simple figures with the accompanying
results.
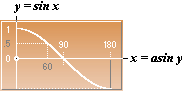
Sine
function, y=sin x:
Dn y = – cosx
= tanA [= y/x]
1/cosx = –1/tanA
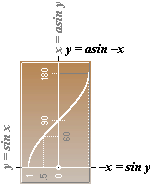
Arc Sine
function, y=asin –x:
Dn y = 1/cosy = 1/√1–(siny)² = 1/√1–x²
Dn asin–x = 1/√1–x²
Dn asinx = –1/√1–x2
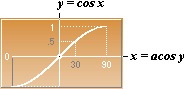
CoSine
function, y=cos x:
Dn y = sinx
= tanA [= y/x]
–1/sinx = –1/tanA
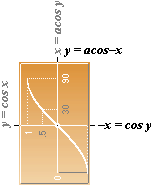
Arc CoSine
function, y=acos –x:
Dn y = –1/siny = –1/√1–(cosy)² = –1/√1–x²
Dn acos–x = –1/√1–x²
Dn acosx = 1/√1–x2

Tangent
function, y=tan x:
Dn y = 1/(sinx)2 = tanA [= y/x]
–(sinx)2 = –1/tanA
y = cot x :
Dn y = –1/(cosx)2 = tanA [= y/x]
(cosx)2 = –1/tanA
Arc Tangent
function, y=atan –x:
Dn y = –(siny)2 = –1/1+(tany)² = –1/1+x²
Dn atan–x = –1/1+x²
Dn atanx = 1/1+x2
y = acot–x :
Dn y = (cosy)2 = 1/1+(coty)² = 1/1+x²
Dn acot–x = 1/1+x²
Dn acotx = –1/1+x2
Compilation
Arc Derivatives in PREFIXxSIN:
Dn asinx = Dn acos–x
= –1/√1–x2
Dn acosx = Dn asin–x
= 1/√1–x2
Dn atanx = Dn acot–x
= 1/1+x2
Dn acotx = Dn atan–x =
–1/1+x2
The
derivatives with angle coefficient
ADDING THE
ANGLE COEFFICIENT
If we
introduce a zooming factor or a coefficient n to the variable x,
we find that the corresponding aspect ratio towards the square unit has
changed. To restore the square unit in the result, we then must zoom the y-extension
by the same zooming factor n. Then we directly receive from the previous
developments
Dn sin nx = –n(cos nx)
Dn cos nx = n(sin nx)
Dn tan nx = n(sin nx)–2
Dn cot nx = –n(cos nx)–2
For the arc
functions in the previous, we have respectively
[–x=sin y]asin, [–x=cos y]acos, [–x=tan y]atan, [–x=cot y]acot
where all x
become squared in the end-connections, as previously shown. With a zooming
factor n the end result hence relies on the square of nx for the
variable with an additional n for restoring the square unit ratio. In
total we hence receive for the arcs
Dn asin nx = –n/√1–(nx)2
Dn acos nx = n/√1–(nx)2
Dn atan nx = n/1+(nx)2
Dn acot nx = –n/1+(nx)2
With these details
we should be fairly well prepared to meet (any of) the more sophisticated
levels in related mathematics.
END.
FORMLAGARNA
I HÄRLEDNING
innehåll: SÖK äMNESORD på denna sida Ctrl+F · sök ämnesord överallt i SAKREGISTER
FORMLAGARNA I HÄRLEDNING
ämnesrubriker
innehåll
APPENDIX
referenser
[HOP]. HANDBOOK OF PHYSICS, E. U. Condon, McGraw-Hill 1967
Atomviktstabellen i HOP allmän referens i denna presentation, Table 2.1 s9–65—9–86.
mn = 1,0086652u ...................... neutronmassan i atomära massenheter (u) [HOP Table 2.1 s9–65]
me = 0,000548598u .................. elektronmassan i atomära massenheter (u) [HOP Table 10.3 s7–155 för me , Table 1.4 s7–27 för u]
u = 1,66043 t27 KG .............. atomära massenheten [HOP Table 1.4 s7–27, 1967]
u = 1,66033
t27 KG .............. atomära massenheten [ENCARTA 99 Molecular
Weight]
u = 1,66041 t27 KG ............... atomära massenheten [FOCUS MATERIEN 1975 s124sp1mn]
u = 1,66053886 t27 KG ........ atomära massenheten [teknisk kalkylator, lista med konstanter SHARP EL-506W (2005)]
u = 1,6605402 t27 KG .......... atomära massenheten [@INTERNET (2007) sv. Wikipedia]
u = 1,660538782 t27 KG ...... atomära massenheten [från www.sizes.com],
CODATA rekommendation från 2006 med toleransen ±0,000 000 083 t27 KG (Committe on Data for Science and Technology)]
c0 = 2,99792458 T8 M/S ........ ljushastigheten i vakuum [ENCARTA 99 Light, Velocity, (uppmättes i början på 1970-talet)]
h = 6,62559 t34 JS ................. Plancks konstant [HOP s7–155]
e = 1,602 t19 C ...................... elektriska elementarkvantumet, elektronens laddning [FOCUS MATERIEN 1975 s666ö]
e0 = 8,8543 t12 C/VM ............. elektriska konstanten i vakuum [FOCUS MATERIEN 1975 s666ö]
G = 6,67 t11 JM/(KG)² .......... allmänna gravitationskonstanten [FOCUS MATERIEN 1975 s666ö] — G=F(r/m)² → N(M/KG)² = NM²/(KG)² = NM·M/(KG)²=JM/(KG)²
BKL BONNERS KONVERSATIONSLEXIKON Band I-XII med
Suppement A-Ö 1922-1929, Bonniers Stockholm
[BA]. BONNIERS ASTRONOMI 1978 — Det internationella standardverket om universum sammanställt vid universitetet i Cambridge
t för 10–, T för 10+, förenklade exponentbeteckningar
MAC, modern akademi (Modern ACademy)
(Toroid Nuclear Electromechanical Dynamics), eller ToroidNukleära Elektromekaniska Dynamiken

![]()


är den dynamiskt ekvivalenta resultatbeskrivning som följer av härledningarna i Planckringen h=mnc0rn, analogt Atomkärnans Härledning. Beskrivningen enligt TNED är relaterad, vilket innebär: alla, samtliga, detaljer gör anspråk på att vara fullständigt logiskt förklarbara och begripliga, eller så inte alls. Med TNED får därmed (således) också förstås RELATERAD FYSIK OCH MATEMATIK. Se även uppkomsten av termen TNED [Planckfraktalerna] i ATOMKÄRNANS HÄRLEDNING.
Senast uppdaterade version: 2018-12-27
*END.
Stavningskontrollerat 2012-08-20.
åter till portalsidan
· portalsidan är www.UniversumsHistoria.se
∫
√ τ π ħ ε UNICODE — ofta använda tecken i
matematiska-tekniska-naturvetenskapliga beskrivningar
σ
ρ ν ν π τ γ λ η ≠ √ ħ
ω →∞ ≡
Ω
Φ Ψ Σ Π Ξ Λ Θ Δ
α
β γ δ ε λ θ κ π ρ τ φ
σ ω ∏ √ ∑ ∂ ∆ ∫ ≤ ≈
≥ ← ↑ → ∞
↓
ζ
ξ
Pilsymboler, direkt via tangentbordet:
Alt+24
↑; Alt+25 ↓; Alt+26 →; Alt+27 ←; Alt+22 ▬
Alt+23
↨ — även Alt+18 ↕; Alt+29 ↔
☺☻♥♦♣♠•◘○◙♂♀♪♫☼►◄↕‼¶§▬↨↑↓
→←∟↔▲▼
!”#$%&’()*+,
■²³¹·¨°¸÷§¶¾‗±
*
åter till portalsidan
· portalsidan är
www.UniversumsHistoria.se