GRUNDMATEMATIKEN 1 2008IV29 a BellDHARMA production | Senast uppdaterade version: 2023-02-22 · Universums Historia
innehåll
denna sida · webbSÖK äMNESORD på
denna sida Ctrl+F · sök ämnesord överallt i SAKREGISTER · förteckning över alla webbsidor
Grundmatematiken |
Den Komplexa Algebran-Geometrin
DEN KOMPLEXA ALGEBRAN
KomplexALGEBRA
2005XI8 | MPcExempel 2003XII6
|
IMAGINÄRA
ENHETEN i genom
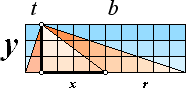
Cheops Rektangel
Cheops Rektangel med 2r=t+b och r=x+t VINKELSUMMATEOREMET visar att komponentuppdelningarna i xy
gömmer en avancerad metodkomponent — en komponentuppdelare. Genom att närmare
studera hur vinkelsummeringen går till i detalj finner vi den som en inneboende
komponentidentifierare. Den följande beskrivningen med harmoniska
trianglar ger en konkret illustration. HARMONISKA TRIANGLAR (H) är rätvinkliga
trianglar xyr vars alla sidor består av hela tal (1, 2, 3, 4, 5, … N). De kallas konventionellt
»tripletter». Deras grundform härleds ur Cheops Rektangel y2=bt [från y/t=b/y] enligt y2=(2r–t)t=bt=(2[x+t]–t)t=(2x+t)t. Med t=1 erhåller man y2=(2x+1)=b=N2 ; y=N
; x=(y2–1)/2 ; r=x+1 ........................................ harmoniska trianglarna |
|
y=N |
1 |
2 |
4 |
3 |
4 |
8 |
5 |
6 |
12 |
7 |
8 |
16 |
9 |
… |
|
x |
0 |
1,5 |
3 |
4 |
7,5 |
15 |
12 |
17,5 |
35 |
24 |
31,5 |
63 |
40 |
… |
|
r |
1 |
2,5 |
5 |
5 |
8,5 |
17 |
13 |
18,5 |
37 |
25 |
32,5 |
65 |
41 |
… |
|
Udda N (1, 3, 5, 7, 9, …) ger H-tringlar
direkt. Jämna N (2, 4, 6, 8, …) kräver en dubblering. SUMMAN av två
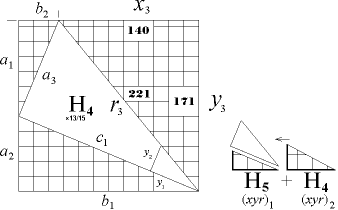
H-trianglar Ha+Hb resulterar i en tredje H-triangel Hc enligt x=(x1x2–y1y2) ; y=(y1x2+x1y2) ; r=r1r2(=)D1+D2 ............... vinkelsummateoremet |
Exempel:
|
(H5xyr)1 |
+(H4xyr)2
|
= (Hxyr)3 |
|
(12;5;13)H5 |
+(15;8;17)H4 |
= (140;171;221)H |
|
Om vi utnyttjar ovanstående enkla grundtabell för H-trianglarna och på
dem tillämpar vektorproduktens ekvivalent r1r2 från vinkelsummateoremet ovan på två likadana
trianglar kan vi studera komponentuppdelningen på ett mycket enkelt
sätt. Vi ser nämligen att summan av två H3 via r1r2 ger H7 enligt (H3xyr) + (H3xyr) = rH32 = 25, = rH7 = (x24; y7; r25) Produkten r1r2=rH32 via Pythagoras
sats är [(x2+y2)1/2]2=x2+y2. Vinkelsummateoremet med (xy)1=(xy)2=(xy)H3 visar oss de motsvarande komponenterna xH7 yH7 x2–y2 2xy Vi känner igen typen från första
binomlagen. Om vi jämför dess motsvarande (x+y)2 får vi x2+y2 +2xy Likheten är onekligen slående. Om vi fortsätter undersökningen genom att addera ytterligare en H3 till summan ovan, och sedan ytterligare en H3 successivt, finner vi den ordning som tabellen nedan beskriver. Vi får naturligtvis samma resultat oberoende av vilken H-triangel (eller annan typ) vi väljer eftersom vi här endast studerar den algebraiska sammansättningen. |
forts. GRUNDERNA I DEN KOMPLEXA ALGEBRAN
vinkelsummateoremets
termer:
TABELL FÖR
SUMMERING AV LIKA H-TRIANGLAR
|
x |
y |
summa lika H-trianglar |
|
x |
y |
1 |
|
x2 – y2 |
2xy |
2 |
|
x3 – 3xy2 |
3x2y – y3 |
3 |
|
x4 – 6x2y2 + y4 |
4x3y – 4xy3 |
4 |
|
x5 – 10x3y2 + 5xy4 |
5x4y – 10x2y3 + y5 |
5 … |
binompotensernas termer till jämförelse:
|
x |
+ y |
(x+y)1 |
|
x2 + y2 |
+ 2xy |
(x+y)2 |
|
x3 + 3xy2 |
+ 3x2y + y3 |
(x+y)3 |
|
x4 + 6x2y2 + y4 |
+ 4x3y + 4xy3 |
(x+y)4 |
|
x5 + 10x3y2 + 5xy4 |
+ 5x4y + 10x2y3 + y5 |
(x+y)5 |
|
Som vi ser är koefficienter (talvärdena
framför xy) och potenser (eg. exponentvärdena) helt identiska.
Enda skillnaden är att polariteterna är annorlunda — tydligen efter
ett visst bestämt mönster. Den enkla slutsatsen är alltså att det ser
ut som att binompotenserna skulle kunna användas som ekvivalenter till
vinkelsummateoremet. Eller rättare sagt: det ser ut som att
vinkelsummateoremet innefattar binompotenserna i sig; Titta på H1-triangeln. (x0; y1; r1); Den finns alltid med (för oss gömd) i alla y-komponenter
från början eftersom den i vilket fall alltid har enhetsvektorn 1. Den syns
alltså aldrig. Men den verkar. Vänta bara ska du få se. Om vi sätter in H1-triangeln i uppställningen för summan av lika H-trianglar ovan finner vi hela hemligheten med den gåtfulla kopplingen mellan vinkelsummateoremet och binompotenserna. Nämligen med rH1 som en teckenväxlare och y-koordinat-identifierare. |
|
x |
|
y |
summa rH1-trianglar |
rH1-vektorns egenmultiplikation |
|||
|
0 |
................. |
1 |
1 |
r1 = |
1 |
rH1 |
y-bunden |
|
–1 |
................. |
0 |
2 |
r2 = |
–1 |
–1 |
x-bunden |
|
0 |
................. |
–1 |
3 |
r3 = |
–1 |
–rH1 |
y-bunden |
|
1 |
................. |
0 |
4 |
r4 = |
1 |
1 |
x-bunden |
|
0 |
................. |
1 |
5 |
r5 = |
r1 |
rH1 |
y-bunden |
|
Ordningen avbildar xy-koordinaterna
för rH1-pinnen
i steg om exakt 90° i moturs rotation för varje summering enligt schemat med ändpunkten i koordinaterna xy
enligt 0 ; 1 –1 ; 0 0 ; –1 1 ; 0 … Om vi på prov genomför en summering med en
godtycklig triangel (H) och H1, finner vi också att hela
H vrids moturs,
alltså vinkelmässigt korrekt positivt, ett 90°-steg för varje H1-summering.
Den automatiska komponentuppdelningen som vinkelsummateoremet uppvisar
och som växlar mellan xy-axlarna är därmed, tydligen, identifierad. Vi
kan studera saken på närmare håll om vi går tillbaka till tabellen för summeringen av lika H-trianglar.
Om vi studerar den ordningen kan vi nu närmare se en återspegling av hur rH1 sicksackar y-x–y-x-y–… med sin
vektoretta, som dessutom växlar tecken varannan gång i sin komponent. Vi ser
därmed också nu tydligare hur rH1 flyttar över fokus till xy-sidorna
enligt +yY, –y2x, –y3Y, +y4x, +y5Y, –y6x, … och så vidare. SLUTSATS: Om vi tar vara på denna tydliga naturvink,
kan vi alltså lika gärna härma det automatiska beteendet hos rH1 genom att helt enkelt explicit associera
den med alla y-komponenter i binompotenserna (x+y)n enligt rH1y — som ger härmningen eller metoden r=(x+rH1y)n och sedan tillämpa ovanstående lagbundenhet
på resultatet. Det är hela hjärtats hemlighet med den s.k. komplexa algebran. |

forts. GRUNDERNA I DEN KOMPLEXA ALGEBRAN
|
Rollen för rH1 som glänsande komponentidentifierare
innebär alltså att den associerar sig med y, inte x, i
grundläget eftersom rH1 inte har någon x-komponent där. Av samma skäl är den låst vid y
i motsatt läge, alltså motsvarande (rH1)3. För alla övriga fall försvinner den, rH1=±1, vilket säkerställer att vektorsummeringen med y-delarna
tillsammans med x-delarna i de lägena fungerar. rH1-pinnen är
alltså ingen uppfinning av någon person eller institution utan — tydligen —
en i mönstergeometrins struktur inneboende matematisk logisk motor.
Ovanstående observationer betyder nu endast, om vi förstått saken
rätt, att om vi sätter ihop rH1 tillsammans med y och iakttar nämnda
ordning — rH1 står till tjänst med ±1 om den befinner sig i x-axeln
och endast då — kommer ingenting
annat att inträffa än det som vi redan observerat redan finns inneboende i
komplexet. Det vill säga, vi skulle då ha lockat ut den underbara anden ur
flaskan för att bereda oss nytta enligt den följande ordningen. Vi sätter i för metodidentifieraren
eller den komplexa enheten rH1 rH1 = i
................. (komponent-)
metodidentifieraren, komplexa enheten/identifieraren (även benämnd imaginära
enheten) Vektorpotenserna (rH1)n, motsvarande de successiva 90°-vridningarna, lyder då som ovan ordningen
i0=1, i1=i, i2=–1, i3=–i=i–1, i4=i0=1, i5=i1=i, och så vidare i all oändlighet. Vi kan alltid subtrahera periodtalet
4 från i-exponenten, resultatet stämmer alltid ändå. Om vi utnyttjar mod-operatorn [n mod 4 ger för godtyckliga hela tal n
alltid 0, 1, 2, eller 3, mod-operatorn härrör från den mäktiga divisionsalgoritmen
som en kvots rest] kan vi återföra alla möjliga heltalsvärden n
för i-potenserna på formen inmod4 motsvarande kvadrantrotationerna i0, i1, i2, i3. För att uttrycka komponenterna tillsammans
med metodidentifieraren i skriver vi alltså metoden r = x+iy ................... = Öx2+y2 komplexa
algebran Pythagoras
sats Därmed kan nu den komplexa enhetens definition preciseras exakt enligt följande. Definition av komplex
kvantitet — i är inget tal (Jämför den moderna akademins lärostoff i ämnet); i är en METODIDENTIFIERARE med i=(0;1): en komplex kvantitet r är ENLIGT RELATERAD MATEMATIK
— sättet vi använder r på — en hypomängd (hypotenusa) i dess Pythagoreiska
(rektangulära) form Ö a2+b2 som är formaterad på metodidentifieraren (i) i a+ib
(även »den komplexa formen»), således inkluderande xy-axlarna
men inte deras paralleller 0+ib
= (0;y)Y-KOMPONENT = Ö 02+b2 a+i0 = (x;0)X-KOMPONENT = Ö a2+02 Därmed kan vi fritt behandla alla
komponenter i grundformen precis så som vi sett att rH1-pinnen
arbetar. Vi kan fritt summera, addera, dividera och subtrahera och utföra
alla övriga operationer på i-tecknade (dvs., komplexa)
matematiska uttryck. Kvantiteten x+iy kommer alltså att på vanligt
sätt motsvara den Pythagoreiska hyposidan Ö(x2+y2) från matematikens fem grundlagar. Nu kollar vi om allt stämmer: vi ska testa
genom att multiplicera vektorerna r1r2 enligt de simpla ekvivalenterna (x1+iy1)(x2+iy2). Om vi har hittat rätt, ska vi få självaste
vinkelsummateoremet
i slutänden! Vi får r = (x1+iy1)(x2+iy2) = x1x2 + x1iy2 + iy1x2 + iy1iy2 =
x1x2+ i(x1y2+y1x2) + i2(y1y2) ; Med i2=–1 har vi alltså = x1x2 + i(x1y2+y1x2) – y1y2 och därmed = x1x2–y1y2 + i(x1y2+y1x2) ; r = x +
iy ; x = (x1x2 – y1y2) y = (x1y2 + y1x2) Med andra ord: Exakt samma resultat som i hela utvecklingen
till vinkelsummateoremet — på tre rader. Här kan man tala om
effektivitet. Styrkan hos metodidentifieraren, eller komponentorganisatören rH1 är (alltså, på sitt sätt) närmast oerhörd. |
forts. GRUNDERNA I DEN KOMPLEXA ALGEBRAN
DEN KOMPLEXA
ENHETEN rH1=
i
|
Vinkelsummateoremet — rnÛna; x=x1x2–y1y2; y=x1y2+y1x2; r=r1r2 — visar att xy-komponenterna i summeringen av växande antal lika trianglar (xyr) beskriver binompotensernas koefficienter (x+y)n. Skillnaden består endast i en ordnad teckenväxling vars motorik kan återföras på den harmoniska elementära H1-triangelns (x0; y1; r1) stegvisa kvadrantrotation (in). Vi igenkänner därför H1-triangeln rH1 = i som en xy-komponentuppdelande metodidentifierare även benämnd komplexa enheten eller (från 1500-talet) imaginära enheten betecknad i (från slutet av 1700-talet, se även längre ner i Historia). Den komplexa enheten (i) associeras med y-termer i xy-planet enligt r=x+iy=Ö x2+y2. Innebörden av i i de fyra kvadranterna ger via rnÛna
i0=1, i1=i, i2=–1, i3=–i=i–1, i4=i0=1 … Vinkelsummateoremet med r=(x+iy) ger utvidgat rn=(x+iy)n Û na.
Tillsammans med sambanden i Resultatredovisning för vinkelsummateoremet, xn/rn=sinna och yn/rn=cosna med rn=rn, får vi alltså även rn = (xn+iyn) = rn. Med (x + iy)n/rn ges vidare ekvivalent [(x + iy)/r]n=(x/r + iy/r)n. Dessa samband används (se nedan) explicit för härledningen till serierna för sinus och cosinus med den komplexa metodidentifierarens hjälp. |
Den komplexa algebrans fullständiga
nomenklatur framkommer först med härledningen till serierna för sinus och
cosinus med rH1-pinnens hjälp — där vidare samband
för den komplexa algebran innefattas. Vi studerar hur med början från Serierna
för Sinus och Cosinus via i.
forts. GRUNDERNA I DEN KOMPLEXA
ALGEBRAN 2005XI9
|
Se
även motsvarande härledning till Serierna
för Sinus och Cosinus utan hjälp av i Härledningen till Serierna för sinus och
cosinus via i SAMMANSTÄLLNING i PREFIXxSIN — Varför är ”serierna för sinus och
cosinus” viktiga? — När de elektroniska
kalkylatorerna började komma ut på markanden i slutet av 1970-talet, berodde
deras popularitet just (främst) på bekvämligheten att slippa slå i (dryga)
tabeller för att få fram konkreta värden i trigonometriska beräkningar; Man
behövde nu bara ”trycka på knappen” med SIN eller COS så var allt klart i en
hast. Serierna för sinus och cosinus (och många flera) bildar i varje fall den
datoriserade grundvalen för varje mera avancerad teknisk tillämpning.
ANIMERINGAR, till exempel, (generellt 3D-geometrin) vore helt omöjlig utan en
datoriserad grund med sinus-cosinus-beräkningar (objektens rotation). Vinkelsummateoremet
rn=(xn+iyn)=rnÛna med likvärdiga n · a = ¥
· dA=ò dA=A ger oss direkt (x/r +
iy/r)n = (sina + icosa)n = (x + iy)n/rn = [(xn+iyn)=rn]/rn = xn/rn + iyn/rn = sinna + icosna = 1 = Ö (sin na)2+(cos na)2 = Ö sin2na + cos2na Med slutvinkeln na=¥dA=ò dA=A — med överförda beteckningar na:=¥da=ò da=a — ges x = sin[daÛ0]
= 1, y = cosda = daÛ0. Och alltså är (sinda + icosda)¥=(1+ida)¥ = (1+ia/¥)¥ = sin¥da + icos¥da = sina + icosa Exponentialekvivalenterna — Eulers ekvivalenter från utvecklingen
av logaritmderivatan enligt positionsformen i nollformsalgebran
med den mängdoberoende
¥
— sammanför ovanstående med den naturliga logaritmbasen e och
därigenom med binomialteoremet
(BT) enligt (1+x/¥)¥=(1+1/¥)¥x = ex ..................................... Eulers ekvivalenter ;
Således (1+ia/¥)¥=(+1/¥)¥ia = eia som ger oss (1+ida)¥ = (1+1/¥)¥ia = eia = sina + icosa ........................ Eulers formel, a=p ger f.ö. eip=–1=i2 analogt ep/2=i1/i=i–i som via BT
ger m®¥ eia =
1+å [ia]m!/[m+1]! m=0 med upplösningen
i de bägge komponenterna m®¥ m®¥ eia =
1+å [ia]2m/2m! + å [ia]2m–1/(2m–1)! = 1 m=1 m=1 som i beaktande av i0=1, i1=i, i2=–1, i3=–i=i–1, i4=i0=1 … som innebär att alla i2,4,6…= – + – + … och alla i3,5,7…= ii2,4,6… = i( – + – + …) m®¥ ger = 1+å(–1)ma2m/2m! ................................................... sinusdelen, x m=1 med serien sina = 1 – a2/2! + a4/4! – a6/6! + a8/8! – a10/10! + a12/12! –… i S-delen m®¥ och +
i ·å(–1)m+1a2m–1/(2m–1)! .................................... cosinusdelen,
iy m=1 med serien cosa = a – a3/3! + a5/5! – a7/7! + a9/9! – a11/11! + a13/13! –… i S-delen enligt PREFIXxSIN med a i radianer. Serierna konvergerar ytterst snabbt med praktiskt taget en korrekt decimal per beräknad delterm. imaginärtrigonometriska
grundsambanden sini och cosi Med alla i2,4,6…= – + – + … och alla i3,5,7…= ii2,4,6… = i( – + – + …) framgår att den komplext tecknade
vinkeln ia ger seriernas absolutvärden (alla tecken positiva) enligt imaginärtrigonometriska sambanden (se vidare nedan i Imaginärtrigonometriska
funktionerna) sin ia = sini a = (ea+e–a)/2 och cos ia = i cosi a = i(ea–e–a)/2 med sini a + cosi a = ea. Konventionellt skrivs sini
som cosh och cosi som sinh (MATEMATIKLEXIKONs175sp2, hyperboliska funktioner) med benämningen »hyperboliska» funktioner — typformen 1 = (sini a)2 – (cosi a)2 till skillnad från den goniometriska typformen 1 = (sin a)2 + (cos a)2. Dessa begrepp (och deras historia) beskrivs mera utförligt längre fram i Imaginärtrigonometriska funktionerna. |
forts. GRUNDERNA I DEN KOMPLEXA ALGEBRAN
Se även i Historisk
referens till Eulers Ekvivalenter
HISTORIA
LEONHARD EULER (1707-1783) SOM DEN EXAKTA MATEMATIKENS BANEMAN
|
Enligt MATEMATIKLEXIKON W&W 1991 s110sp2ö var det Leonhard Euler som (efter flera hundra års bekantskap med »imaginära tal») införde beteckningen i=Ö–1 år 1777. Euler betraktas enligt källan som banemannen i ”den moderna analysen”. Men det märkliga är, att Eulers väsentliga föreställningar om analysen (”funktionslära” enligt Euler, MLs131sp2ö) övergavs för helt andra företräden under 1800-talet (från Eulers funktion=analytiskt uttryck till Cauchys och Dirichlets avbildningsbegrepp [1837]). Snarare än en plats i den moderna akademins historia bör alltså Euler ha sin självskrivna plats i utvecklingen och upptäckterna av matematiken som exakt vetenskap. Eulers funktionsbegrepp är nämligen det rätta — betydligt mera djupgående än den moderna akademins ytterst ytliga föreställningar: Vi har tidigare t.ex. studerat definitionen av intervall, integral och punkt och som vi nu vet modern akademi INTE kan härleda utan måste uppfinna. Mina egna matematiska referenser från utomstående under min egen matematiska utvecklingshistoria (i stort sett genomgående under 1980-talet) är ytterst magra — i jämförelse med de jättelokaler som tillhandahålls av inrättningar typ universitetsbibliotek. Mina egna referenser inskränker sig här till vad varje innevånare kan finna i sitt stadsbibliotek — som för den delen har en bra täckning sett till det allmänt etablerade utbudet. Se vidare i Allmänna referenser till Matematiklitteraturen. För min del sökte jag själv FÖRST de elementära härledningarna på egen hand för att därefter eftersöka etablerade källor till jämförelse. Inte sällan med upptäckten att väsentliga partier saknas — i den etablerade litteraturen. På senare tid (90-talet) kom MATEMATIKLEXIKON W&W 1991 som ger en del referenser för den etablerade matematikens kännedom (dock utom högskolenivå). Först sedan jag själv upptäckt den mängdoberoendes (¥) viktiga grund, upptäckte jag i MATEMATIKLEXIKON artiklar som ger en del referat från Leonhard Eulers arbeten (från 1748) — och som visar tydliga paralleller. Tyvärr ger inte källan någon exakt redovisning av Eulers utsagor. Källan anger t.ex. på sidan 110 ett skrivsätt ”w=x/i” som sägs vara Eulers med ”i” i mening ”oändligt stort tal”. Källan beskriver inte denna detalj vidare, om det är källans tolkning, eller Eulers explicita mening, eller hur Euler resonerade i saken. Essensen av sambanden i de Eulerskt presenterade teckningarna är dock densamma som i den relaterade matematiken med den mängdoberoende enligt motsvarande w=x/¥=dx. Källan anger (s110sp2ö) ”E. skriver aw=(1+kw)”, vilket närmast för vår del motsvarar edx=(1+dx)=ex/¥=(1+x/¥), och därmed (1+x/¥)¥ = ex, vilket är helt korrekt (Se Beviset för e). Det är alltså av det skälet uppenbart att Euler synes ha varit VÄL förtrogen med (den praktiska sidan av) den mängdoberoendes inflytande. Innebörden av ¥ har emellertid aldrig kommit fram i den moderna akademins lärosystem, och därmed har även beskrivningen av Eulers samband tappat den förklarande kärnans essens. Euler uppvisar genom källan ovan flera bevis på sin förtrogenhet (funktionsbegreppet). Men dessa banbrytande idéer övergavs under 1800-talet — med dess berömda allmänna omdaning av logiken. Jämför — i analogi med Eulers galant enkla och tydliga funktionsbegrepp (för vidare analys): FUNKTION: · allt utom konstanter; · allt som från en godtycklig punkt P har en entydig utsträckning En konstant kan inte gestalta en variation. En funktion (variation) blir därför analytisk genom att den kräver positionsformen dy/dx=y’. Funktionskriteriet ansluter till UNIVERSALSATSEN*. Jämför –x/x=–1: |x| är INTE en funktion utan två. ICKE-FUNKTION definieras som ett avbrott i funktionen. *UNIVERSALSATSEN ingår ännu (Juli 2008) inte i den här presentationen,
den tillhör den
högre analysen med ekvationsläran (inkluderat funktionsbegreppet med talteorin ENLIGT RELATERAD MATEMATIK) och dess (mycket) omfattande verk. Målet är att även få
med denna del (så småningom). — Verkställt 2009-01-10. Se från Analysen. Funktionsbegreppet generellt i
matematiken. Efter Leonhard Euler (1707-1783, se även Historia
ovan) skriver vi typiskt en funktion, vilken som helst, på den allmänna
bekväma formen y = f (x) ..................... Eulers funktionsbegrepp Vi läser det som ”y (y) är lika med (=) funktionen (f ) för x (x)”. y betecknar funktionsvärdet och x betecknar variabelvärdet. Jämför t.ex. parabelns funktion, y=x2; varje variabelvärde x (vanligen horisontella axeln eller abskissan) ger via funktionen för x (som i detta fall är x2) ett resultatvärde y (vanligen vertikala axeln eller ordinatan); I fallet parabeln kan vi alltså efter Euler skriva analytiskt att f (x) = y = x2. |
forts. GRUNDERNA I DEN KOMPLEXA ALGEBRAN
DEN KOMPLEXA ALGEBRANS TERMINOLOGI
|
Alla utvecklingar här i PREFIXxSIN I EULERS FORMEL eiv = sinv + icosv
måste vi observera multipliciteten för vinkeln v enligt v=v+n·360°.
I »normala fall» (v avser en singulär förekomst) har
multipliciteten n ingen som helst betydelse. Är emellertid v
associerad med en delningsfaktor typ v/m ges v/m=v/m+n·360°/m.
Beskrivande övningsexempel följer. Generellt beaktar vi därför eiv= eiv + in·2p eftersom ei2p = ein·2p = 1 = sin n
· (360° = 2p radianer) Vilket vill
säga; Den givna vinkeln v kan upprepat ”sättas på samma ställe”
medan r-pinnen snurrar runt varv efter varv
i enhetscirkeln. Den FULLSTÄNDIGA
v-formen är alltså eiv + in·360°
= i(v + n·360°) = ip = sin p + i cos p med p = (v
+ n·360°). I samband där bara
en enda rotation förekommer [p=p/1 som ger i(v
+ n·360°)=iv] kan den enklare formen med v=p
användas. Vi kommer att studera ett detaljerat exempel för övning och
återerinring i efterföljande exempelblock. DEN KOMPLEXA
ALGEBRANS TERMINOLOGI Nedanstående
termbeteckningar ansluter (i stort) till gängse förekommande beteckningar. i ........................................ komplex identifierare-enhet r ....................................... komplex vektor a ....................................... real del (x), Re b ....................................... imaginär del (y), Im |
z | = Ö a2 + b2 ................ absolutvärde, vektor eller modyl v ....................................... argument, vinkel mellan z och
x-axel, v = arg z a
= | z | sinv
..................... real
del via sinus b
= | z | cosv
..................... imaginär
del via cosinus b/a
= tanv
........................ se
v ovan z
= a + ib
............................ hypokvantitet
på komplex (komponent-) form _ z = a – ib ............................ komplext konjugat till a+ib eiv = sinv
+ icosv ............... vinkelenhetstransformator, r=1,
komplexa kvantitetens polära form reiv = r(sinv + icosv) ......... r
= | z | , allmänna vinkelenhetstransformatorn z
= | z | (sinv + icosv) ........ polärformen
för komplex kvantitet; z
= reiv ................................ centrala sambandet, r cirkelradien = | z | med |
forts. GRUNDERNA I DEN KOMPLEXA ALGEBRAN
ÖVNINGAR PÅ ALLMÄNNA KOMPLEXA UTTRYCK
|
Hur komplexa uttryck kan skrivas (v = atan
b/a) : z = 2 = 2eiv = 2ei · (v = atan 0/2 = 0) =
2ei · 0° z = i = eiv = ei · (v = atan 1/0 = 90°) =
ei · 90° = eip/2 * z = 2i = 2eiv = 2ei · (v = atan 2/0 = 90°) = 2ei · 90° z = 1+
i = Ö 2 eiv = Ö 2 ei · (v = atan 1/1 = 45°) = Ö 2 ei · 45° Studera dessa exempel noga. De är
uppställda i syfte att komprimera så mycket sammanfattning som möjligt på så
litet utrymme som möjligt för snabb memorering. Försök komma ihåg
implikationerna (de här explicit ej tecknade underliggande delarna)
som leder till de aktuella resultaten. Erinra blott: om ekvivalenten till
z är en
singulär koefficient är det en Re-komponent,
annars en Im-komponent. Använd sedan den allmänna (v = atan Im/Re) för att utveckla exponenten v. Gå tillbaka
till grundformerna (se föregående block) om påtet
ovan är idel hieroglyfer. (Tro det eller inte, men det är så
även för ”proffs” — i tidens längd. Man kommer inte ihåg ett dyft om man inte
arbetar med detaljerna kontinuerligt. Därför behöver man en avancerad
minneslapp — speciellt om detaljerna är många, som i teckenhavet ovan). *
i = eip/2; i1/i=ep/2=i –i; i i=e–p/2; i2 =–1= eip; ip=ln–1; i=ln i2/p=(2/p)(ln i);
ip/2=ln i; … EKVATIONER MED KOMPLEXA KOEFFICIENTER löser man (HL högra delen av hela ledet, använd ni = z = reiv) Exempel: x4 = 16i ; HL = 16i
= 16eiv = 16ei · (v = atan 16/0 = 90°) = 16ei · 90° VL = x4 ; x = reiv ,
x4 = r4ei · 4v
; VL = HL
; r4ei · 4v = 16 ei · 90° ; r4 = 16 r = 161/4 = 2 . ei · 4v = ei · 90° = ei · (90° + n360°) ; ei · v = ei · 90°/4 = ei · (90° + n360°)/4 Erinra den fullständiga
v-formen med n som heltal (n börjar från 0, se slutlig
Lösning nedan) eiv + in·360° = i(v + n·360°)
= ip = eip= sinp + icosp ei
p/k = sin p/k + icos p/k v
= 90° p
= (90°
+ n360°), p/4 = (22,5° + n90°) eiv = ei · p/4 = ei · (22,5° + n90°) = [sin (22,5° + n90°) + icos
(22,5° + n90°)] Härifrån samlas de alternerade lokalerna för r-pinnen
via n, den sluter cirkeln på n(v/n): n=0 Û p = (22,5°
+ 0·90°) = 22,5° ¬ n=1 Û p = (22,5°
+ 1·90°) = 112,5° n=2 Û p = (22,5°
+ 2·90°) = 202,5° n=3 Û p = (22,5°
+ 3·90°) = 292,5° n=4 Û p = (22,5°
+ 4·90°) = 382,5° = 22,5° de
4 rötterna repeteras sedan ändlöst med början från toppen igen Lösning: x = (16i)1/4 = 2i1/4 = reiv = 2ei · (22,5° + n · 90°) = 2[sin (22,5° + n90°) + icos
(22,5° + n90°)] Kommentar Lösningen betyder hörnen på en regelbunden polygon inskriven i
cirkeln med radien r=2. Exempel: k = (1 +
iÖ3)15 ; z = 1 + iÖ3 ; arg z = v
= atan Ö3/1 = 60°; r = [Ö 12 + (Ö3)2 ] = 2 k = z15 = (reiv)15 = (2eiv)15 = 215ei 15v ei · 15(v
= atan Ö3/1 = 60°) = ei · 900° Û 180° = (sin 180
+ icos 180) = (–1 + 0) = –1 ei15v = –1 Lösning: k = (1 +
iÖ3)15 = –215 = –32768 |
forts. GRUNDERNA I DEN KOMPLEXA ALGEBRAN
Imaginärtrigonometriska
funktionerna
eller DE ANALYTISKA Trigonometriska SAMBANDEN i PREFIXxSIN
sini cosi tani seci csci coti
Centralserierna i sin-sini och
cos-cosi är exakt desamma — de skiljer sig endast i polaritet. Sett till
derivatorna, har sini-cosi relationerna inga negativa tecken.
I konventionell litteratur kallas de
imaginärtrigonometriska relationerna för hyperboliska funktioner, de betecknas
sinh cosh tanh sech csch coth där
h:et utläses ”hyperbolicus”. Vi kommer här längre fram att relatera dessa
begrepp mera ingående — för säker bekantskap.
Modern akademi
har en sällsynt träffsäker förmåga att benämna matematikens områden med
associerande begrepp — som ligger helt vid sidan av sakens kärna.
|
DE
IMAGINÄRTRIGONOMETRISKA FUNKTIONERNA är ENLIGT RELATERAD MATEMATIK helt och
hållet analytiska funktioner. De härrör från beteckningarna — men
utan motsvarande geometriska relationsbegrepp — i serierna för sinus och cosinus genom
att sätta samtliga termer i nämnda serier positiva, se mera preciserat nedan.
För att skilja den imaginära, positiva serien från den verkliga skrivs här
ett ”i” efter den
senare för den förra. Ekvivalenterna till positiva sinus och cosinus bildar
då motsvarande komplexa vinkelkoefficienter sin ix=sini
x och cos ix=cosi x. Medan den reala trigonometrin
tecknar 1=(sinx)2+(cosx)2 blir
motsvarande samband med införandet av komplex vinkelkoefficient 1=(sinix)2+(cosix)2=(sini x)2+(i cosi
x)2=(sini x)2+i2(cosi x)2=(sini x)2–(cosi x)2. Därav
benämningen hyperbolisk i modern
akademi: Den liksidiga hyperbelns allmänna ekvation har just typformen 1=x2–y2
— se även i Begreppet HYPERBOLISK. Men där
stannar också kopplingen till hyperbeln. De imaginärtrigonometriska
funktionerna är genom den komplexa vinkelkoefficienten rena cyklometriskt komplexa
funktioner och har inte ett dyft att göra med vare sig trigonometri
(goniometriska relationer, förhållanden mellan sidor i rätvinkliga trianglar)
eller hyperbler. De imaginärtrigonometriska funktionerna har emellertid en
stark koppling till den elementära fysiken genom catenarian
eller kedjelinjen. Utöver catenarian som praktisk tillämpning,
erbjuder ImTrigarna genom sina ekvivalenter ett särskilt område som kan
utnyttjas inom algebran. DEN KOMPLEXA ALGEBRAN I MODERN REGI är
känd för att vara särskilt knölig. Här följer därför en mera noggrann — om än
sammanfattande — genomgång av ImTrigarna enligt RELATERAD matematik. I DEN ALLMÄNNA BESKRIVNINGEN AV TRIGONOMETRIN förenklas symbolberget
betydligt om man till exempel i stället för den fullständiga formen 1=(sinx)2+(cosx)2 skriver 1=sin2+cos2. Eftersom
aspekten redan är klar, förutsatt full förtrogenhet med trigonometrin, är
missförstånd uteslutna. Endast i speciella fall används fullständiga former. FRÅN EULERS
EKVIVALENTER eller exponentialekvivalenterna kommer
vi ihåg positiv exponent (1+1/¥)¥x =
(1+x/¥)¥ = ex = 1 + x + x2/2! + x3/3! + x4/4! + … +
xm/m! =
2,718 28 18 28 45 90 45… ..................................... med x=1 negativ exponent (1+1/¥)¥(–x) = (1–x/¥)¥ = e–x = 1 – x + x2/2! – x3/3! + x4/4! – … +
(–x)m/m! =
0,36 78 79 44 11 71… ........................................... med x=1 Kommer vi också ihåg att alla i2,4,6…= – + – +
… och alla i3,5,7…= ii2,4,6… = i( – +
– + …) finner vi likt Leonhard Euler att ex + e–x = 2[1
+ x2/2!
+ x4/4!
+ x6/6!
+ x8/8!
+ x10/10!
… JÄMFÖR vi med sinusserien i PREFIXxSIN m ® ¥ sin x =
1 – x2/2! + x4/4! – x6/6! + x8/8! – x10/10! + … = 1+ å (–1)mx2m/2m! m=1 finner vi m ® ¥ sin
ix = 1
+ x2/2!
+ x4/4!
+ x6/6!
+ x8/8!
+ x10/10!
+ … = 1+ å x2m/2m! m=1 = 2–1(ex + e–x) PÅ SAMMA SÄTT finner vi för cosinusserien i PREFIXxSIN att ex – e–x = 2[x +
x3/3!
+ x5/5!
+ x7/7!
+ x9/9!
+ x11/11!
… m ® ¥ cos x = x
– x3/3! + x5/5! –
x7/7! + x9/9! – x11/11! + … =
å (–1)m+1x2m–1/(2m–1)! m=1 m ® ¥ cos
ix = i(x +
x3/3!
+ x5/5!
+ x7/7!
+ x9/9!
+ x11/11!
+ … = iå x2m–1/(2m–1)! m=1 = i 2–1(ex – e–x) Resultat: sin ix = sini x = (ex+e–x)/2 sini x = sin ix = (ex+e–x)/2 cos ix = i cosi x = i(ex–e–x)/2 cosi x = i–1cos ix = (ex–e–x)/2 sini x + cosi x = ex ; sini ix + cosi ix = eix = sin x
+ i cos x = 1 =
sin
i2x + i–1cos i2x =
sin
–x + i–1cos –x =
sin
x – i–1cos x |
forts. GRUNDERNA I DEN KOMPLEXA ALGEBRAN
|
MED UTGÅNGSPUNKT
I REALA TRIGONOMETRISKA FUNKTIONER, första ledet nedan, med vidare införande
av den komplexa identifieraren i som en vinkelkoefficient, leder relationerna
I FÖRTYDLIGANDE till 1 = (sinx)2 + (cosx)2 .............. cirkulära, reala trigonometriska = (sin ix)2 + (cos ix)2 .......... cirkulära,
imaginära trigonometriska = (sini x)2 + (i cosi x)2 = (sini x)2 – (cosi x)2
.......... resultat, imaginära
trigonometriska; hyperbolisk form = (åsin+)2 – (åcos+)2 ;
________ sini = Ö cosi2+1 = åsin+ ........... absoluta sinusserien
________ cosi = Ö sini2–1 = åcos+ ........... absoluta cosinusserien Med sini x = 2–1(ex + e–x) = sin
ix cosi x = 2–1(ex – e–x) = i–1cos ix återkopplas
sambanden på ytterligare ekvivalenter via Eulers formel sinx+icosx=eix enligt sini ix = 2–1(eix + e–ix) = sin x = sin i2x = sin –x cosi ix = 2–1(eix – e–ix) = i cos x = i–1cos i2x = i–1cos –x Vi kan alltid
kontrollera resultaten direkt genom enkel huvudräkning genom att återknyta
till enhetscirkeln med sinus-cosinusprojektionerna om vi kommer ihåg att den
komplexa identifieraren i betyder en positiv rotation med 90 grader. Så
återfinner vi speciellt från leden icosx=i–1cos–x ovan
att –cosx=cos–x. Med tani = cosi/sini finner vi
(efter mellanräkningar) Som sini+cosi=ex finner vi genom
det triviala ex=ex, som ger x=ln
ex, att x=ln(sini+cosi). Därmed ekvivalenterna xsinix = ln (sini + [sini2–1]1/2) xcosix = ln (cosi + [cosi2+1]1/2) Genom att
utveckla det motsvarande uttrycket från tani finner vi xtanix = 2–1ln[2(1–tani)–1–1] |
Därmed är genomgången av DEN KOMPLEXA ALGEBRAN ENLIGT RELATERAD MATEMATIK avslutad.
forts. GRUNDERNA I DEN KOMPLEXA ALGEBRAN
Introduktion till Catenarian — i fortsättning från ovanstående avsnitt
IMAGINÄRTRIGONOMETRERNAS DERIVATA
|
Genom exponentderivatan
Dne(P)=e(P)Dn(P) i Formlagarna
får vi direkt från sini x = 2–1(ex + e–x) = sin ix = åsin+ cosi x = 2–1(ex – e–x) = i–1cos ix = åcos+ tangensformerna ________ Dn sini = cosi = Ö sini2–1 ________ Dn cosi = sini = Ö cosi2+1 Med tani = cosi/sini ges direkt från
EXP(6) i Formlagarna Dn tani = sini–2 = seci2 Dn coti = –cosi–2 = –csci2 CATENARIAN även sv. Katenarian — eller Kedjelinjen KURVLÄNGDEN s
för en kurva y=f (x) ges genom differentialerna
ds2=dx2+dy2 varav (ds/dx)2=1+(dy/dx)2=1+(y’)2=(s’)2, s’ = Ö 1+(y’)2 OM y=sini
får man y’=cosi och därmed s’ = Ö 1+cosi2 = sini = y
; y’
= s’ = sini y’ = s’ = cosi KRAFTVÄGARNA FHs och FVc med avseende på
en gemensam referenspunkt bildar en jämvikt FHs=FVc. Vi skriver FH=H och FV=T. OM systemet
befinner sig i ett Galileiskt kraftrum (tyngdkraftens verkan gäller konstant
oberoende av rummets utsträckning) gäller i varje utsträckning s/c=T/H=dy/dx=y’ Med c=1
gäller ________ s’
= dy/dx = y’= ò Ö 1+(y’)2 dx ________ s’ = ds/dx = Ö 1+(y’)2 Därmed bildar
kurvlängden s=cosi en catenaria [från Latinets cate’na,
kedja] eller en kedjelinje y=s’=sini=(ex+e–x)/2, samma som
en fritt hängande lina, rep eller kedja mellan två upphängningspunkter i ett
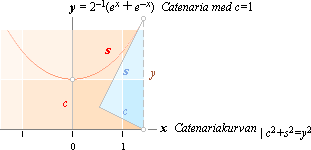
rum med konstant tyngdkraftsacceleration. Catenarians kurvlängd från lägsta punkten till P är samma som catenarians tangent i P. Illustrationen
nedan visar en catenaria med c=1 enligt y = 2–1(ex + e–x).
För given
catenaria är c alltid en konstant Med konstanten c
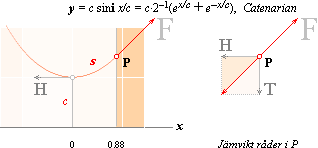
inkluderad får catenarian den fullständiga formen y = c · sini x/c = c · 2–1(ex/c+ e–x/c) = cå sin+ ............................ Catenarian y’ = cosi x/c = 2–1(ex/c – e–x/c) = å cos+ .......................... tangenten s = cy’
.............................................................................................. kurvlängden catenarians kurvlängd
Catenarian har samma form som ett fritt hängande elastiskt rep (lina)
eller kedja. Upphängd i en punkt P i en vägg, påverkas repet av en kraft F i P i
tangenten s/c = cosi x = T/H. H är den
horisontella kraften vid catenarians lägsta punkt och T är tyngden av s. xcosix=1 = ln(1 + Ö 2) = 0,8813735… .................... exempel med tangenten 1 |
forts. GRUNDERNA I DEN KOMPLEXA ALGEBRAN
Klargörande
Begreppet HYPERBOLISK
|
Karaktären för
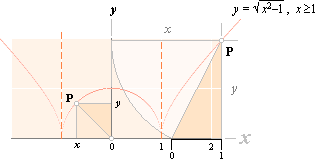
enhetshyperbeln (horisontella sambandet) jämfört med cirkeln För en cirkel y=Ö1–x2
— se den rödorangea cirkelkurvan i mitten — är avståndet mellan P och origo alltid
den konstanta radien r=1: x2 + y2 = 1. För
enhetshyperbeln y=Öx2–1 — se den
orangea hyperbelkurvan figuren ovan till höger/vänster — [även benämnd liksidiga
hyperbeln] gäller att distansen mellan P och x-axeln via x-längden
alltid avskär en rätvinklig triangel med basen lika med enheten 1, y
som vertikalen och x som hypotenusan: x2 – y2 = 1. Imaginärtrigonometrins enhetsform sini2–cosi2=1 har alltså
hyperbelns algebraiska typform, men i övrigt ingen som helst koppling
till hyperbeln. Sini och cosi-begreppen är tydligen komplementära komplexa
beskrivare. De har, uppenbarligen, ingen som helst kvalitativ
koppling till hyperbeln. |
innehåll: SÖK äMNESORD på denna sida Ctrl+F · sök ämnesord överallt i SAKREGISTER
Grundmatematiken |
Den Komplexa Algebran-Geometrin
ämnesrubriker
innehåll
H-trianglaran · den imaginära
enheten genom Cheops Rektangel
Catenarian äv. sv. Katenarian eller
Kedjelinjen
referenser
MATEMATIKLEXIKON — WAHLSTRÖM & WIDSTRANDS MATEMATIKLEXIKON, 1991
”En bearbetad översättning av W. Karush The Crescent Dictionary of Mathematics (1962) utgavs 1970 under titeln Matematisk uppslagsbok. En omfattande revision har nu ansetts angelägen.”, Förordet.
Senast uppdaterade version: 2023-02-22
*END.
Stavningskontrollerat 2011-07-18.
rester
*
PNG-justerad 2011-07-18
åter till portalsidan ·
portalsidan är www.UniversumsHistoria.se