MATEMATIKEN3D 2008XI2 BellDHARMA | 2006XI11 | Senast uppdaterade version: 2019-12-04 · Universums Historia
innehåll
denna sida · webbSÖK äMNESORD på
denna sida Ctrl+F · sök ämnesord överallt i SAKREGISTER · förteckning över alla webbsidor
 — ENLIGT PILOTSYSTEMET XYZxyz
— ENLIGT PILOTSYSTEMET XYZxyz
ALLMÄN GENOMGÅNG AV GRUNDBEGREPPEN I 3D-GEOMETRIN MED PERSPEKTIV- OCH PERCEPTIONSGRUNDERNA
Appendix ¦ 3D-GEOMETRIN 2008 — från 3D-geometrins grunder 2006XI11 | urspr. frn. grundmanus 1976-1984 | — sammanställning med kortare beskrivningar
|
|
3D-MATH PERSPECTIVE GEOMETRY —
its natural foundation EQUIVALENCE
OF ROTI AND ROTII ¦ The ORIGIN OF ROTII ¦ FJÄDERANALOGIN — Spring Analogy Sfärperspektivet | Lagerqvistsyndromet | Perspektivkroppen | 3D-matematiken
| Linjärperspektivgeometrins grunder | HP-kroppen | |
|
|
|
|
|
|


|
|
|
|


3D-GEOMETRIN
2008 ¦ 2019
|
Pilotsystemet —
relaterad matematik ANVÄNDS ALDRIG GENERELLT I ETABLERAD
LITTERATUR
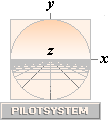
Bilden på tjejen är tagen ur en gammal
tidning (i slutet av 1990-talet) eller katalog som jag inte minns namnet på.
Jag ber om ursäkt för det. Jag hoppas hon inte misstycker att bli utnyttjad
på det här oanmälda sättet.
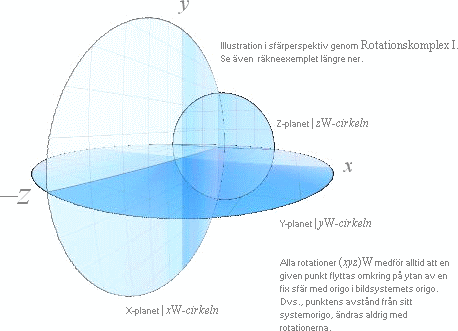
koordinataxlar och rotationsaxlar xyz KOORDINATPLAN och ROTATIONSPLAN XYZ
3D geometri
är (enligt erfarenhet)
den datorstödda läran och kunskapen om beskrivning
och presentation av formerna i
rummet xyz på den plana bildytan xy * PRESENTATIONEN AV 3D-GEOMETRINS NOMENKLATUR försvåras avsevärt på grund av den moderna akademins sällsynt illa valda preferenser. Det mest naturliga valet av alla, pilotsystemet med positiva z i framriktningen, används INTE i den etablerade 3D-nomenklaturen på annat sätt än som ett NEGATIVT SYSTEM. Därmed blir matematiken också maximalt krånglig: studenten TVINGAS tänka i onaturliga banor, samt därmed acceptera DET som ”nomenklatur”. Man vänjer sig. I relaterad fysik och matematik är pilotsystemet ett positivt preferenssystem, precis som vi ser DET naturligt (med positivt till höger och uppåt, negativt till vänster och neråt). |

3D-GEOMETRIN
2008
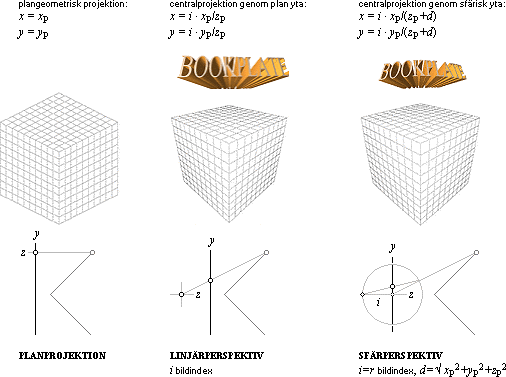
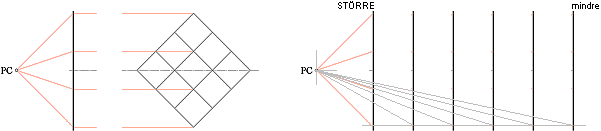
3D-GEOMETRINS 3 PUNKTFÄLT
Planprojektion
— Linjärperspektiv — Sfärperspektiv:
|
3D-geometrins
3 punktfält
|

SFÄRPERSPEKTIVET: Introduktion ¦ Härledningar
|
ytutfyllande
spegelsymmetrisk figurin av BellDharma
1995: 1. Robin Hoods Stövlar 2.
Porträtt, Escher i Stormhatt, 3. (rotera 90°) Berglandskap med Glaciär. Höger: Självporträtt av Escher i litografi 1943 från
Grafik och teckningar, M. C. Escher (1959) |
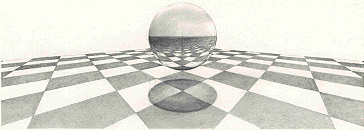
SFÄRPERSPEKTIVET verkar vara helt orepresenterat i den vetenskapligt beskrivande formen på INTERNET. Det finns mig veterligt heller inget (kommersiellt) 3D-program som innefattar den synnerligen enkla sfäriska algoritmen (se nedan). Det finns visserligen artiklar som omnämner termen ”sfäriskt perspektiv”, och som även i en del fall ger någon illustration, men det materialet är ytterst magert för att inte säga helt obefintligt. Det bästa illustrativa materialet är rent artistiskt, av ypperligt hög kvalitet och sammanhänger med namnet Maurits Escher. Men, som han själv skriver, var han mindre intresserad av att förklara och beskriva än att utföra sina helt enorma och fantastiska, högst fascinerande verk. Jag introducerades för Escher i början på 1970-talet av en skolkamrat (en genuin Escherbeundrare), och det är Escher som inspirerat mig att göra en fullständig genomarbetning av (bl.a.) sfärperspektivet. |

Sfärperspektivet, härledningar med RITEXEMPEL: Projektionssambanden ¦ GrundRITNINGAR MED PASSARE

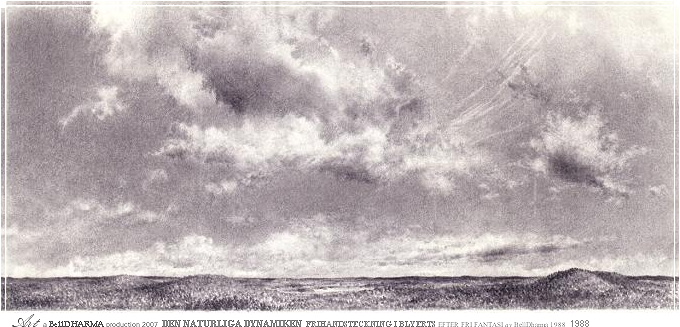
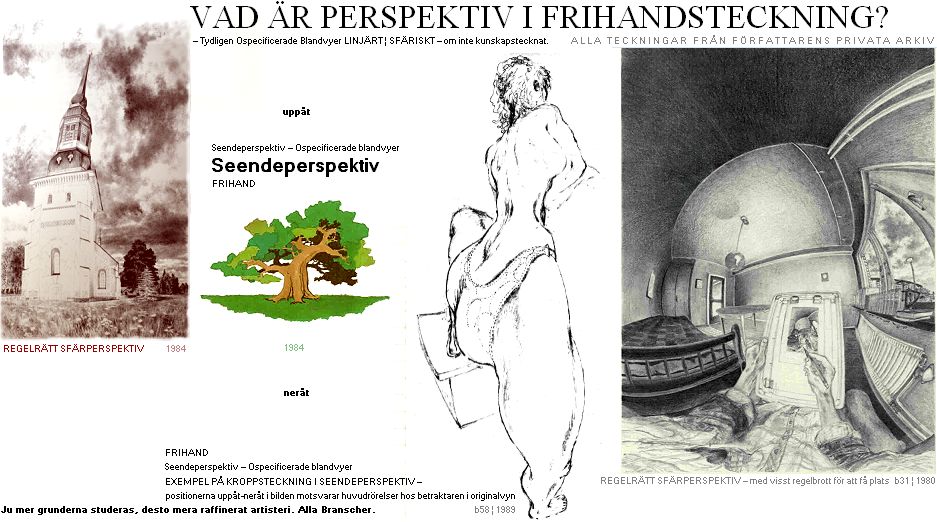
MITTEN: FRIHANDSTECKNING ENLIGT GRUNDERNA I DEN SFÄRISKA
PERSPEKTIVGEOMETRIN »SEENDEPERSPEKTIVET» — Blyerts 1984 — Kopierat med lätt
rödton, original A3.
SFÄRPERSPEKTIVET — projektionssättet
SFÄRISKA PERSPEKTIVETS
PROJEKTIONSPRINCIP illustrerat:
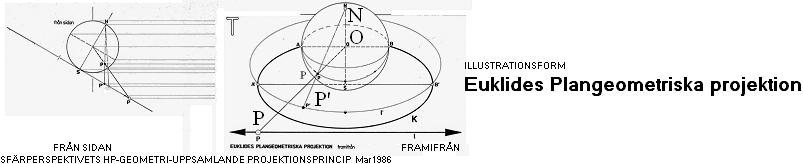
EN URSPRUNGLIG
Synlinje från sfärens centrum origo O till en rumspunkt P skär sfärytan i en
avbildad make P. För att få med även rumspunkter innanför sfären anställs en
NODPUNKT — själva sfärperspektivets öonpunkt N på sfärens baksida och i
perceptionsriktningen (z): Från N siktas sfärP:et på en underliggande PLAN
bildyta — idealt genom sfären i mitten, eller på godtyckligt avstånd från O: P’
kan då avbilda praktiskt taget HELA xyz-rummets P — frånsett N-punkten.
— Illustrationen
nedan visar hela principen i extrem vy:
Vänsterdelen
ovan BF i figuren visar projektionsprincipen med P-avbildningen i P’ via
ögonpunkten N från den ursprungliga spegelbilden av xyz-rummet på sfärytan —
och även objekten innanför denna. Objektspunkter även bakom ögonpunkten N kan
avbildas — visas. Men då i motsvarande »oändligt förstorad version» ju närmare N
sfärP:et ligger från rumsP:et.
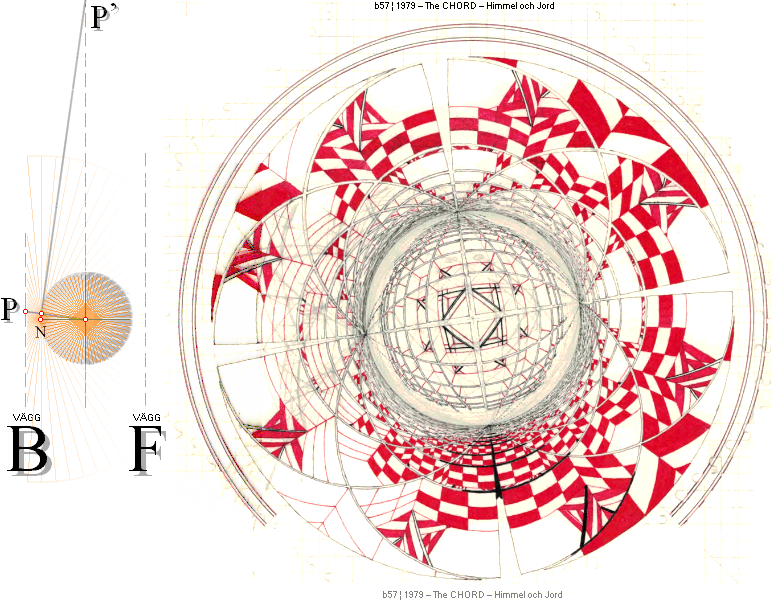
— Det är,
tydligen »Det
Verkliga INRE Seendeperspektivet» — »drömvärldens visuellt olika avsnitt,
kollage och inskjutningar»;
— Allt är
synligt i Mind:et. Eller
som en del säger det i Bion: ”You can run, but you cannot hide”. Bilden ovan
1978-79 är tecknad med vanlig passare efter de uppdagade härledningarna till
sfärperspektivets matematiska geometri — efter inspirerat arbete från Maurits
Escher[‡]. Se CHORD-KROPPEN.
Ett alternativt visningssätt till ovanstående visas nedan
från från tiden med DELPHIchords2003:
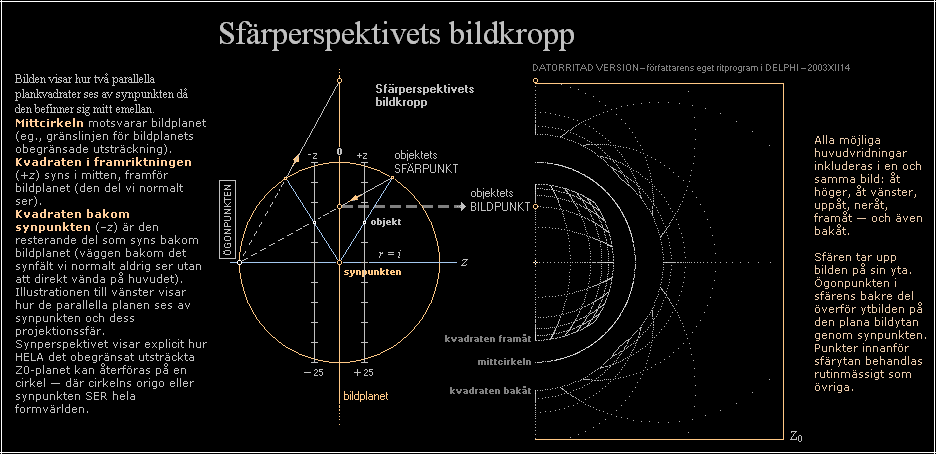
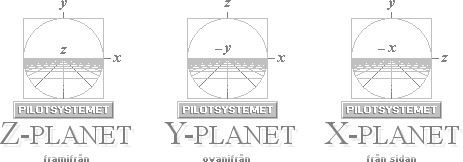
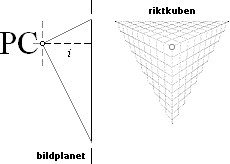
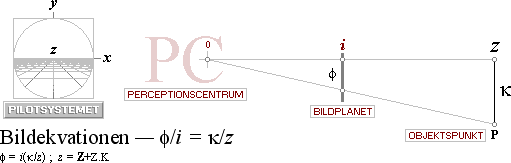
Z(0)-PLANET —  med nomenklaturen från PILOTSYSTEMET — är här
benämningen på det aktuella BILDPLANET — »filmduken», speciellt 0-planet eller bildprojektionsplanet
i mitten i figuren — som xyz-3D-verkligheten vi lever i
spelas upp PÅ framför våra seende ögon. Trots det systemets förträffliga användbarhet,
används det aldrig, synligt, i etablerad litteratur. — utan krångliga
förvanskningar TYP: negativa värden i framriktningen — men positiva åt höger
och uppåt. Jämför MACz.
med nomenklaturen från PILOTSYSTEMET — är här
benämningen på det aktuella BILDPLANET — »filmduken», speciellt 0-planet eller bildprojektionsplanet
i mitten i figuren — som xyz-3D-verkligheten vi lever i
spelas upp PÅ framför våra seende ögon. Trots det systemets förträffliga användbarhet,
används det aldrig, synligt, i etablerad litteratur. — utan krångliga
förvanskningar TYP: negativa värden i framriktningen — men positiva åt höger
och uppåt. Jämför MACz.
SPHprojDed: SPHded.
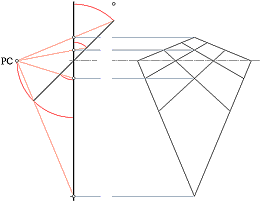
LINJÄRA
FUNDAMENTALA HP-GEOMETRIN
Avbildad på Sfären — FRÅN Pxyz till BILDPLANET (y) som är ställt genom Sfärens
mitt — hela xyz-rummet kan i princip avbildas utom projektionspunkten längst
bak på sfärytan: »MindPerspektivet».
Se även den illustrerade översikten från
ovanstående allmänna beskrivning i 3D-geometrins
3 punktfält
|
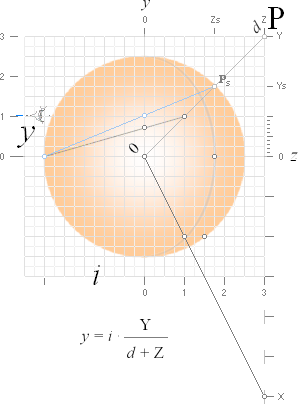
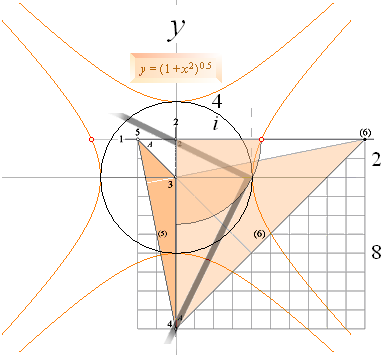
Exempel:
EXEMPEL 1: Figuren ovan visar ett bildklot med radien (BildIndex) i = 2,5
enheter. Objektspunkten (P, överst höger) har koordinaterna P(XYZ) = P(0;3;3) vilket ska motsvara objektspunktens spegelbild på klotytan
precis på omskrivna klotets cirkelradie i den aktuella vyn. Bildpunktens y-koordinat blir då med ovanstående härledda
samband y = iY/(d+Z) med d =
(X²+Y²+Z²)^0,5 som ger =
(2,5)(3)/([0²+3²+3²]^0,5 + 3) = 1,0355339 Med figurens hjälp ser vi att detta värde stämmer
utomordentligt väl med figurens skalvärden. |
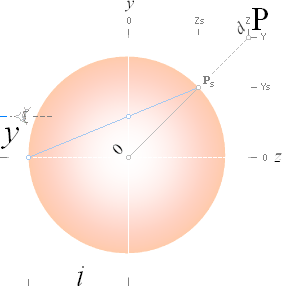
Sfärperspektivet — härledning: d
= √ X2 + Y2 + Z2 = avståndet från koordinatorigo till
objektspunkten (P); Ys
Zs i Ys y i i ——
= —— = —— ; ——— = — ; Ys = Yp — ; Zs
= Zp — ; Yp
Zp d i+Zs i d d i
+ Zs =
i + Zp(i/d) = (i/d)(d+Zp)
; Ys/(i+Zs)
= Ys/(i/d)(d+Zp) ; Ys = Yp(i/d) ; Y = Yp ; Ys/(i+Zs)
= Yp(i/d)/(i/d)(d+Zp) = Yp/(d+Zp) ; Resultat: Ys y Yp ———
= —— = ——— i+Zs i
d+Zp Härledningen ovan för Y-koordinaten med
vyn sedd från sidan gäller även för X-komponenten med vyn sedd ovanifrån,
sambandet blir analogt Xs x Xp ———
= —— = ——— i+Zs i
d+Zp Se även vidstående Exempel. Beviset för att relationerna gäller även i fallen då
spegelpunkten Ps inte ses exakt på sfärytans rand i vyn baseras på att: — Ps ligger i vilket fall på linjen (gömda cirkelbågen som
Y-linjen ritar upp på den speglande klotytan, se även vidare i vidstående
Exempelbeskrivning) mellan Ps[som ovan] och sfärens origo [O]: — Triangelrelationerna Ys/Yp = Zs/Zp med Ys/(i+Zs)= y/i blir i vilket fall analoga — oberoende av X med givna YZ. — Det enda som (då) bestämmer bildpunktens placering (y som
ovan i exemplet) blir alltså X i d: y går mot noll som X växer obegränsat.
Samma typresonemang gäller sedan också för bildpunktens x-koordinat med
projektionen sedd ovanifrån (delvis i mixad vy i vidstående exempelfigur). EXEMPEL 2: Vi använder samma YZ-värden som i Exempel 1 men ett
alternativt X-värde, X=6; [Flera olika sätt finns att kontrollberäkna de inre värdena,
alla kräver dock god inblick i ellipsens och cirkelns elementära geometri, en
del av dessa delar finns beskrivna i CEPH-ekvationen, vi förutsätter
här den bekantskapen]; P(XYZ) = P(6;3;3) Det motsvarar objektspunktens spegelbild på klotytan i den
markerade punkten mellan Ps.O i exempelfiguren. Bildpunktens y-koordinat blir då y = iY/(d+Z) med d =
(X²+Y²+Z²)^0,5 som ger =
(2,5)(3)/([6²+3²+3²]^0,5 + 3) = 0,7247448 vilket vi med figurens hjälp ser stämmer utomordentligt väl. |
|
NOTERA
att (xyz)=0 ligger i sfärens centrum i sfärperspektivet, medan
motsvarande (xyz)=0 för linjärperspektivet ligger i den motsvarande sfärytans
ögonpunkt; ögonpunkten endast FÖRMEDLAR — inte utgör centralpunkten hos — den
bild som ses med PC (PerceptionsCentrum|PerspektivCentrum) i sfärens centrum.
Alla Objekt(xyz) ses därför förminskade i Sfärperspektivet relativt
Linjärperspektivet med samma utgångsvärden, Linjära Sfäriska
För att få ungefärlig överensstämmelse i
växlingen Sfäriskt-Linjärt kan Bildindex (i) ökas till Z.K (Objektets eget
koordinatorigos Z-avstånd). Jämför bilden nedan i sfäriskt perspektiv (i =
Z.K) med föregående linjärperspektiv ovan vänster (Z.K > i):
|

CHORDkroppen: RITNING MED PASSARE
PRINCIP MED GRUNDILLUSTRATIONER
HUR MAN KAN TECKNA SFÄRPERSPEKTIVETS BASPLAN MED PASSARE och linjal:
I KORT ILLUSTRERAD SAMMANFATTNING:
— Sfärperspektivets[‡] MANUELLA UPPRITNING klargör i det allt väsentliga den intima kopplingen och samhörigheten med HORISONTALPERSPEKTIVETS grunder[‡]. Den angivna sambandsformen i figuren nedan beskrivs mera detaljerat i efterföljande text. Här understryks enbart genom den visuella delningsgeometrins nödvändiga förberedelse för Sfärperspektivets uppritning ATT samhörigheten ÄR stadfäst:
HorisontalperspektivgeometrinHPG+SfärperspektivgeometrinSFPG=sant:
— Men var i etablerad litteratur finns beskrivningarna? Jag ser inga. Och Maurits Escher såg tydligen inga han heller för sin tid (1898-1972). Den Moderna Akademins enda intresse i ämnet verkar vara koncentrerat till ABSTRAKT ALGEBRA: ingen illustrativ praktisk koppling: ingen praktiskt — hantverksbetonad — beskrivning eller förklaring. Jämför citatet från WolframMATH2019.
Vi studerar ämnet — noga.
COMPUTER AIDED DRAWING— CAD — datorstödd
ritning:
— Inte
DatorSKAPAD:
— INDIVIDEN skapar
eller upptäcker eller uppdagar ett grundkoncept. Inte Datorn.
Datorn kan sedan
användas för att FRAMHÄVA och TYDLIGGÖRA. Inget annat. Hjälpmedel. Inte
Auktoritet.
Datorn kan med
fördel användas för uppritning av cirkelbågarna med speciellt stor radie —
flaskhalsen vid ritning med fysisk passare.
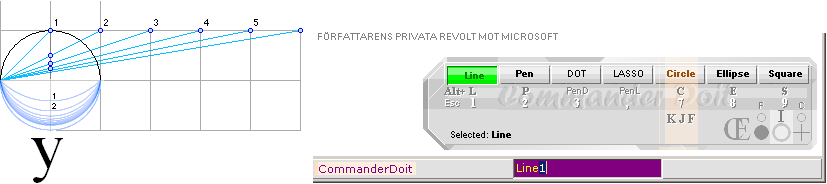
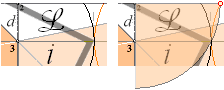
— Sambandet för CIRKELN y = √ 1 — x² prepareras med
variabla insättningar enligt
y =
√ 1 — x²
= —(y) + A√ 1 — (x/A)²
; A = √[1+(a+b)²]
–(0)+([1+(0+0)'2]'0.5)(1–[x/[1+(0+0)'2]'0.5]'2)'0.5
–(1)+([1+(1+0)'2]'0.5)(1–[x/[1+(1+0)'2]'0.5]'2)'0.5
–(2)+([1+(1+1)'2]'0.5)(1–[x/[1+(1+1)'2]'0.5]'2)'0.5
–(3)+([1+(1+2)'2]'0.5)(1–[x/[1+(1+2)'2]'0.5]'2)'0.5
–(4)+([1+(1+3)'2]'0.5)(1–[x/[1+(1+3)'2]'0.5]'2)'0.5
–(5)+([1+(1+4)'2]'0.5)(1–[x/[1+(1+4)'2]'0.5]'2)'0.5
...
![]()
![]()
Ritprogrammet
som använts här utvecklades av författaren (2002+) i DELPHI4 — med STARK undran, och förundran, varför
inte mjukvarujättarna på Jorden BJUDER på den typen i samband med
datorförsäljning — LÅT MÄNNISKORNA UTVECKLAS, för tusan bövlar. Varför inte.
What’sUp?
— DÄRFÖR ATT DET skulle GE ALLDELES FÖR STOR FRIHET ÅT
MÄNSKLIGHETEN individerna själva SOM ISTÄLLET MÅSTE UTSUGAS betala mera MEDAN
DE HÅLLS FÖRSLAVADE I UNDERJORDEN UTAN BELYSNING med ProfitFöretagens Djupt
Beundransvärda ViVeta-DuKöpa. MäGuvaFiiint. Rätta gärna om fel.
— Ritverktyg
— Här i Datorsammanhanget: enskilda pixelsteg
måste kunna navigeras, liksom bestämda återkommande flyttningsintervall i de
olika möjliga bildflyttningsmoderna AND OR XOR, transparent, kvadraturroterande
i steg om 90°, alla kombinationer: piltangenter, sifferbordet,
kontrolltangenter:
— Ett motsvarande KLAVIATUR, en bordsdator.
— Vad vi vet — här — existerar inga sådana
gratis ritprogram på Internet Feb2019 — om alls över huvud taget på Internet
(svårt att få fram exakt VAD som finns i ämnet):
är helt avgörande
för att människor ska kunna utveckla naturvetenskapen. Frågan ställs öppen: FINNS SÅDANA VERKTYG IDAG Feb2019 alls
över huvud taget — dessutom gratis, jättefina, för den som vill och har tid att
arbeta med detaljerna? Webben är full med ”free”. Vad, exakt som döljer sig
bakom är svårare att få reda på. »ENKLA ritprogram» @Internet verkar INTE vara
någon lätt sak att hitta exempel på.
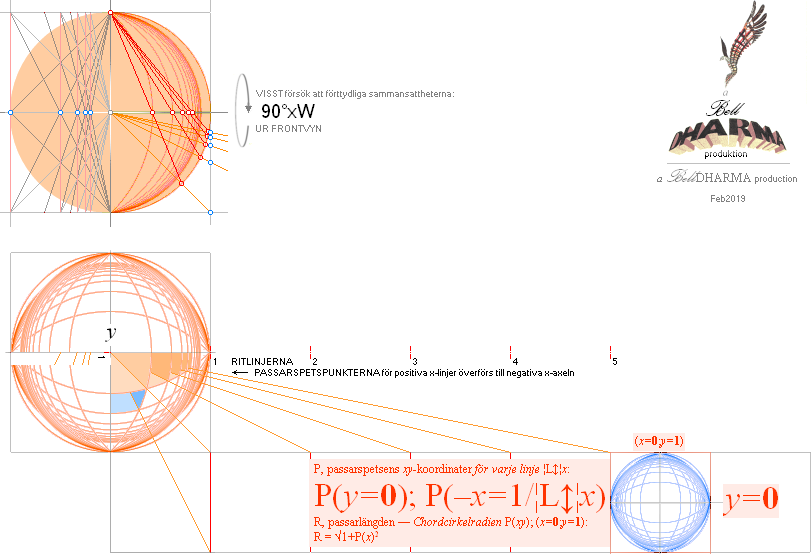
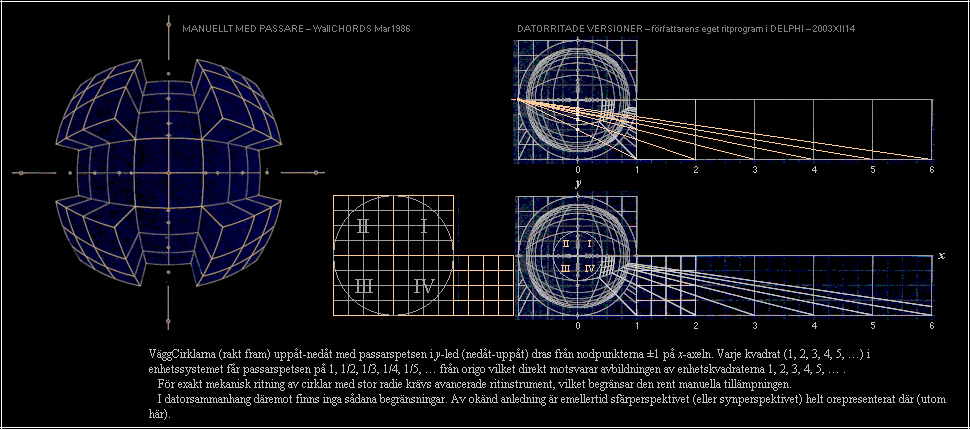
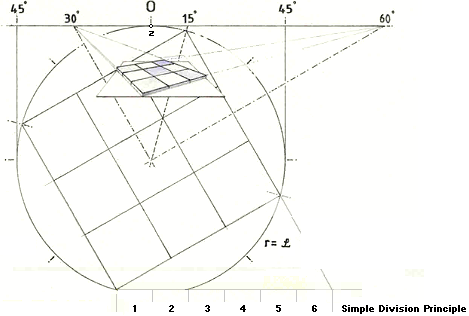
Enhetsrutnätet INÅT x-axeln i
Sfärperspektivets BILDCIRKEL ritas upp UTÅT oändligheten med passarspetsen i 0 — Bildcirkeln —
1 2 3 4 5 .. med passarlängden/ritudden genom x-axelns bildcirkelskärning;
Cirkelradierna för
y = 0 1 2 3 4 5 .. blir respektive
√ 1 + (0+0)² = 1 ¦ √ 1 + (1+0)² = √2 ¦ √ 1 + (1+1)² = √5 ¦ √ 1 + (1+2)² = √10 ¦ √ 1 + (1+3)² = √17 ¦ √ 1 + (1+4)² = √26 ¦ √ 1 + (1+5)² = √37 ¦
...
RITPROGRAMMETS
FUNKTION:
ENTER startar vid makören (tydlig kryssform), precisionsinsättning vid
slutpunkt, SHIFT verkställer — tills ENTER avslutar;
— FÖRE varje SHIFT finns optionen INSERT som pausar och
frikopplar markören som kan flyttas till en färgkarta: vid INSERTNo2 hoppar
markören tillbaka till LämnaLäget, och en SHIFT verkställer på vald färg.
Linjetjockleken kan ställas in separat när som helst med sifferbordets hjälp:
mata in värdet.
— VAR finns den ENKLA typen, dessutom GRATIS,
utom HÄR? Internet Feb2019 verkar INTE vara stället att — ens — försöka få reda
på det.
— Piltangenter,
Sifferbordet, Kontrolltangenterna + Musen — till vänster,
sifferbordet+piltangenterna till höger: bägge händerna används naturligt som
vid ett klaviatur.
Effektivt. Snabbt. Enkelt. Programmet utvecklades av författaren i Borlands
Pascal Turbo Assembler.
Ritverktygen
som medföljer Windows — jämför W10 — innehåller ingen pixelstegning i valfria
intervall för samtliga ritnavigeringar. Vill man dra en linje mellan två
punkter, är det slumpen i slutänden som avgör. Det finns ingen exakt inställning.
Paintbrush i Windows 3.1 hade Det. Men det väldig användbara enkla
ritprogrammet plockades bort med Windows 95. Så: Vad, exakt, VET Microsoft
Feb2019 om Elementär DatorSTÖDD Ritning? Visa gärna med tydliga exempel. Blända
oss.
Enhetsrutnätet UTÅT Sfärperspektivets
BILDCIRKELBÅGE ritas upp genom ENHETSDELNING, figuren ovan:
— Passarlängden som tidigare genom x-skärningen med
bildcirkeln och Passarspetsen successivt på avstånden från origo:
1 ¦ 1/2 ¦ 1/3 ¦ 1/4 ¦ 1/5 ¦ ...
Cirkelradierna för dess delavstånd blir
respektive
√ 1 + (0+1)² = 1 ¦ √ 1 + (0+1/2)² = √5/4 ¦ √ 1 + (1+1/3)² = √10/9 ¦ √ 1 + (1+1/4)² = √17/16 ¦ √ 1 + (1+1/5)² = √26/25 ¦ √ 1 + (1+1/6)² = √37/36 ...
med den
cirkelDatorRitande formen
–(0)+([1+(0+1)'2]'0.5)(1–[x/[1+(0+1)'2]'0.5]'2)'0.5
–(1/2)+([1+(0+1/2)'2]'0.5)(1–[x/[1+(0+1/2)'2]'0.5]'2)'0.5
–(1/3)+([1+(0+1/3)'2]'0.5)(1–[x/[1+(0+1/3)'2]'0.5]'2)'0.5
–(1/4)+([1+(0+1/4)'2]'0.5)(1–[x/[1+(0+1/4)'2]'0.5]'2)'0.5
–(1/5)+([1+(0+1/5)'2]'0.5)(1–[x/[1+(0+1/5)'2]'0.5]'2)'0.5
...
![]()
![]()
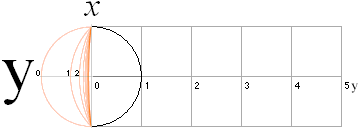
Enhetsrutnätet — den plana bildytans motsvarande
rutnät i fysikvärlden — är så härlett och definierat för
sfärperspektivet.
DIAGONALERNA
behandlas på samma sätt
º via diagonalerna i rutnätet:
— Rita ut diagonalerna i rutnätet med ett motsvarande
diagonalkryss genom bildcirkelns origo=centrum. Måtta på samma sätt som ovan
med passarspetsen i avdelade punkter med tillhörande cirkelbågar genom
skärningen Bildcirkeln xyDiagonalpunkter. Vi gör ett försök:
Enda skillnaden
i sambanden för diagonalerna blir att införa KvadratRotsFörkortningen √2 :
–(0)+([1+(0+1)'2]'0.5)(1–[x/[1+(0+1)'2]'0.5]'2)'0.5
–(1/2√2)+([1+(0+1/2√2)'2]'0.5)(1–[x/[1+(0+1/2√2)'2]'0.5]'2)'0.5
–(1/3√2)+([1+(0+1/3√2)'2]'0.5)(1–[x/[1+(0+1/3√2)'2]'0.5]'2)'0.5
–(1/4√2)+([1+(0+1/4√2)'2]'0.5)(1–[x/[1+(0+1/4√2)'2]'0.5]'2)'0.5
–(1/5√2)+([1+(0+1/5√2)'2]'0.5)(1–[x/[1+(0+1/5√2)'2]'0.5]'2)'0.5
...
![]()
![]()
Notering: FINNS DET NÅGOT MERA stimulerande, matematikutvecklande och
verkligt rejält djupentusiasmerande än att arbeta med dessa STRUKTURER — just att få SKRIVA ut dem,
utveckla dem, och sedan SE dem: oändlighetsperspektiven. Ge gärna exempel den
som vet mer.
Den tidiga
Versionen 1980 med passare och Rotrings nålfina tuschpennor:
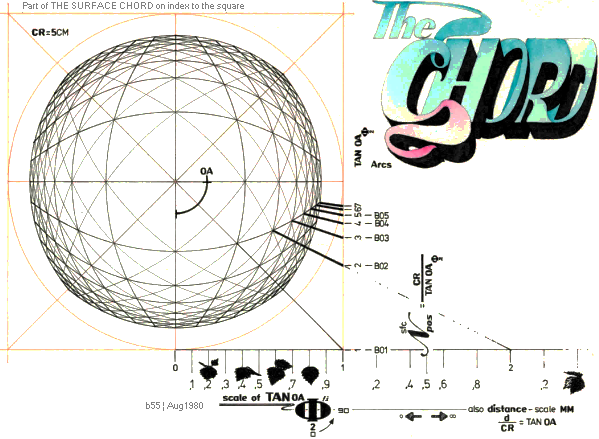
MÅTTSÄTTNING I
KVADRATERNA i vidare mening utförs som antyds i figuren ovan.
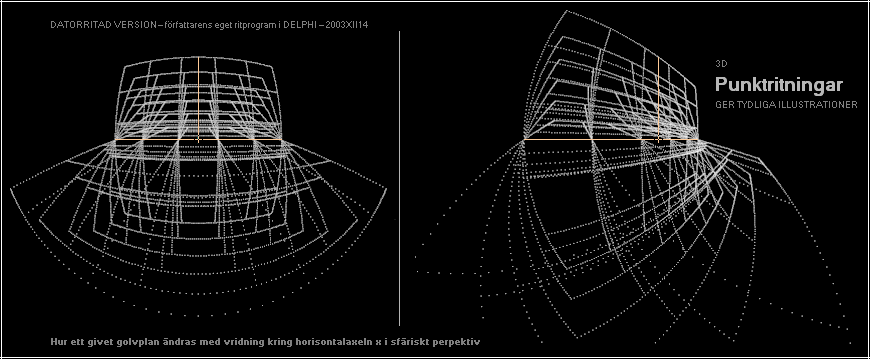
— Mera exempel visas nedan: Datorritat sfärperspektiv 2003
med författarens eget utformade ritprogram i DELPHI-1¦4 — Programformer vars
ÅTKOMLIGHET — successivt från Windows XP och framåt — har stängts ner av
Microsoft.
— DELPHI4 fungerar fortfarande i Windows (10) — men SÅ
våldsamt stympat av Microsoft att programformen »har tappat motorn»:
•
Alla datorprogrammerare är beroende av utvecklingsprogrammens — här DELPHI4 främst — hjälpmanualer.
I originalet (tiden vid Windows XP) användes en WinHELP-fil för att synkronisera
den första datorerans HELP-filer — som DELPHI använder frekvent i sin
CodeEDITOR med bekväma och förnämliga länkopplingar typ: man klickar på ett ord
och kopplas direkt till aktuell FÖRKLARANDE avsnitt. Enbart Windows API-blocket
är (ytterst) omfattande. och man klarar inte programmeringen utan detaljerad
kommandoinformation (med exempel).
— Den möjligheten har Microsoft helt eliminerat med senare
Windows (10): WinHELP-filen kan visserligen kopieras från äldre Windows-system.
Men Windows 10 släpper inte inte in den i något operativt arbete — trots
ihärdiga, otaliga försök. Så har hela det oerhört fina och på sin tid GRATIS
utvecklingsprogrammet för Windows — DELPHI4 — bommats igen av Microsoft:
»åtkomst nekas». Once upon a
time ... there were flowers on the ground ...
Ytterligare
några illustrationer framhäver sfärperspektivets egenheter:
RITPROGRAMMET
här MICROSOFT
STÖDJER INTE LÄNGRE DEN TYPEN använder ett enkelt kvadratiskt plan — valfritt antal delkvadrater — som
sedan kan presenteras i olika perspektiv: plan-, linjär-, eller sfäriskt. För
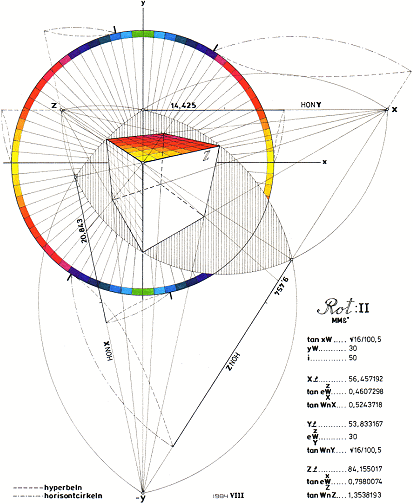
rotationskomplexet, se från Rot1
och Rot 2: Rot1 används uteslutande i
datorsammanhang på grund av dess enkelhet — och oerhörda snabbhet i
beräkningskomplexen.
En enhetligt
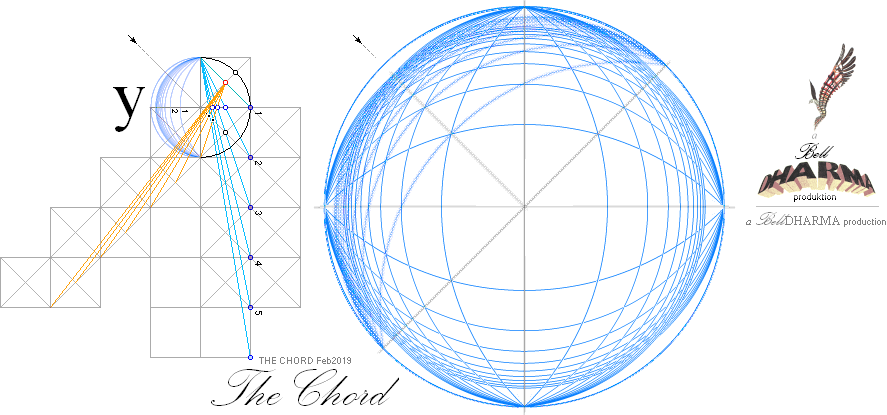
CIRKELRITANDE matematisk sammanfattning för SFÄRPERSPEKTIVEN av typen GÄLLER FÖR SAMTLIGA FALL kan sammanfattas som nedan — cirkelbågar
som avbildar godtyckliga objektslinjer:
— Se vidare förklaring och beskrivning som följer.
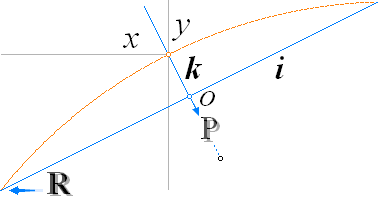
O, origo:
K,
objektslinjens normaldistans från O:
k, avståndet från O
för K-avbildningen: k = R–i:
i, BildINDEX i=1:
P, passarspetsens distans från O för varje objektslinjes distans K från O med motsvarande bildrepresentation k:
P = 1/K
R, passarlängden — ChordCirkelRadien:
R = √1+P2
O, ImageINDEX i =1 @Origo
[»at center»] (origo, from Latin, ”origin”, BKLVIII 1926sp1391):
P, compasses’
OnsetTipDistance from O for each objectLine’s distance K from O with a
corresponding image k;
R, compasses’ length —
the actual CHORD-circle radius.
—
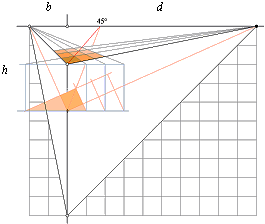
In CAD — Computer Aided Drawing/design — an arbitrary Chord-Arc
such
as the one illustrated (orange) in the left part of the figure above
is computer-drawn in
polar coordinates by the expression
1[2(sin[(x)+(þ/2)([90–45]/90)])] — PREFIXxSIN
þ (ANSI: Alt+0254) specifies pi in author’s program;
First number 1 specifies the actual CHORD-circle radius to be drawn in i-units;
Second number 45 specifies the actual angle (A), here in degrees, by which the
actual Chord-Arc is tilted or twisted from a vertical defaullt 0°. In the
illustration, A=+Arc[Tan(½)]=26,57°,
SFÄRPERSPEKTIVETS
BILDREPRESENTATION för den rena datorhanteringens del: Den är på sitt sätt betydligt enklare
att hantera genom att perspektivpunkterna beräknas som fotografiska bildpunkter
— inga bågritningar — i stor mängd som sedan bakas ihop till en färdigroterad
slutbild (som kräver särskilda
bildalgoritmer för att ge ett slutligt naturligt utseende). Se den enkla
HÄRLEDNINGEN
för xyz-punkternas del.
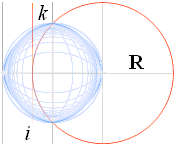
ENHETLIGA ENKLA ALLMÄNNA SAMBAND
AVBILDNINGEN AV YTPLANET xy i Sfärperspektivet (ChordOfARCS — a BellDharma designation only in spite of its mathematical discovery [late1976] after inspired investigations from the great and fascinating works of the graphician Maurits Escher [1898-1972]):
:
ALLA AVSTÅND FRÅN xy-ORIGO
— måttsenhet = Bildindex i = ChordCirkelradien:
——————————————————————————————————
x — linjer parallella med y-axeln:
P(y=0)(–x=1/1)¦L↨x1 ¦ P(y=0)(–x=1/2)¦L↨x2 ¦ P(y=0)(–x=1/3)¦L↨x3 ¦ P(y=0)(–x=1/4)¦L↨x4 ¦ ...
P, passarspetsens xy-koordinater för varje linje ¦L↨¦x:
P(y=0); P(–x=1/¦L↨¦x)
R, passarlängden — Chordcirkelradien P(xy); (x=0;y=1):
R = √1+P(x)2
R = √1+P(x)2 ;
——————————————————————————————————
y — linjer parallella med x-axeln:
P(x=0)(–y=1/1)¦L↨y1 ¦ P(x=0)(–y=1/2)¦L↨y2 ¦ P(x=0)(–y=1/3)¦L↨y3 ¦ P(x=0)(–y=1/4)¦L↨y4 ¦ ...
P, passarspetsens xy-koordinater för varje linje ¦L↨¦y:
P(x=0); P(–y=1/¦L↨¦y)
R, passarlängden — Chordcirkelradien P(xy); (x=1;y=0):
R = √1+P(y)2
R = √1+P(y)2
——————————————————————————————————
SAMMANTAGET KOMPRIMERAT:
——————————————————————————————————
P, passarspetsens xy-koordinater för varje linje ¦L↨¦xy:
P(yx=0);
P(–xy=1/¦L↨¦xy)
R, passarlängden — Chordcirkelradien P(xy); (x=01;y=10):
R = √1+P(xy)2
Sambanden ovan har sammanställts CHORDeq
till en enklare enhetlig sambandsform som gäller för samtliga fall, 0-360°
oberoende av xy-beteckningarna. se CHORDeq.
— polärformen till chord-bågen beskrivs nedan.
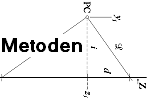
POLÄRA KOORDINATER för ATT få fram GODTYCKLIGT ROTERADE exakta datorSTÖTTritade CHORD-cirklar:
1[2(sin[(x)+(þ/2)([90–45]/90)])] — PREFIXxSIN þ (ANSI: Alt+0254) anger pi;
— Första siffran anger CHORD-cirkelradien R relativt UNIT = BildINDEX-cirkelradien = i;
— Siffran markerad 45 anger aktuella CHORD-cirkelns vridning (+90° i figuren nedan) relativt vertikalläget 0°;
— CHORDA-måttet som PolärCirkeln måste anpassas till för korrekt passning: k = R–i — alltid inom i-distansen.
EXEMPEL: 30° från vertikalt, R=10×(i=50)pixels. Med Kordan (k) markerad tas ChordCirkeln ut enkelt (kopieras direkt) till i-cirkeln, aktuell del.
PolärCirkeln på
formen r = 1[2(sin[(x)+(þ/2)([90–45]/90)])]
ritas alltid roterad relaterad cirkelns toppunkt vid 0°.
— METODEN lämpar sig endast för enskilda Chordcirklar (flera
steg krävs för att sätta samman resultatet = TIDSKRÄVANDE), ingen direkt
systemritning att likna vid föregående rektangulära metod — se CHORD-kroppen.
Se även CHORDeq
sambandet i sammanfattning för godtycklga CHORD-cirklar.
Avslut: CHORDkroppen
MYCKET MER finns säkert att presentera, visa och
studera i ämnet SFÄRPERSPEKTIV. Tills vidare avslutas framställningen här med
att omnämna/illustrera de mest närliggande CHORD-komplexen som också kan ritas
med passare:
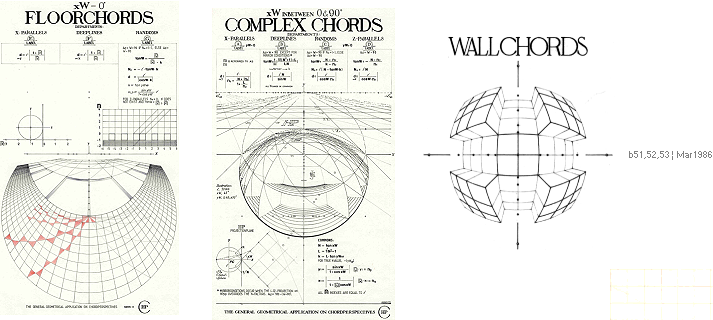
Författarens
manuella sammanställningar för Sfärperspektivets olika ämnesblock Mar1986.
Figurerna ovan — FloorCHORDS, ComplexCHORDS och
WallCHORDS, manuellt ritade och sammanställda av författaren 1986 — har vart
och ett sina speciella sambandsformer:
— Alla är lika omfattande att studera som
fascinerande att arbeta med. Och framför allt, ATT rita upp själv — med en
gammal vanlig klassisk, precisionsställbar naturligtvis, passare.
Avgörande elementära ritverktyg:
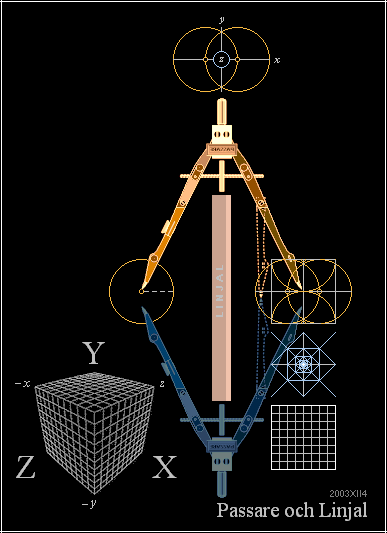
Passare med
StällSkruv, Linjal — och Vinkelhake: noggrant vinkeltestad för bästa resultat:
— VINKELHAKSTESTET: Lägg an och rita: VÄND och titta: Minsta
vinkelfel visas i att linjerna skevar.
— LINJALTESTET: Rita: DiametralVÄND och titta. Minsta
orakhet visas i skevande linjer:
— Fram med Sandpapper och Slipklossar. Vi ger oss inte
förrän resultatet är perfekt. Vi får vila, aldrig ge upp.
— Den som vill investera i ett ritverktyg som, garanterat, håller hela livet ut, som inte kräver batterier eller ström eller underhåll alls, gör klokt i att sondera marknaden för att vaska fram bara det allra bästa.
JÄMFÖR (Feb2019) ELLIPSOGRAFEN HAFF Nr.97:
— Verktygen, instrumenten, tillverkas inte längre.
PASSARE verkar fortfarande finnas en del till rejäla priser — SAMT FÖRETAG nu även Tradera SOM FORTSÄTTER ENVISAS MED COOKIES — insisterar på att besvära privatpersoner med täckande rutboxar typ ”JAG FÖRSTÅR” att medverka i brott mot mänskligheten — Vi Förbättrar Din Upplevelse Genom att Spionera På Ditt Och Andras InternetAnvändande — tydligt utan minsta insikt i vad som försiggår:
— FÖRESTÄLLNINGEN ATT
Internet-INDIVIDANVÄNDARSPIONAGE HAR NÅGOT MED EN FÖRBÄTTRING AV NÅGOT att göra
ÄR RENT FABRICERAT Google-NONSENS FÖR TILLFÄLLET ATT FÅ UTÖVA PRIVATRÄTTSLIGT
INTRÄNGANDE MANIPULERANDE AFFÄRSVERKSAMHET — lagbrott A12UDHR10Dec1948
— SOM VORE DET FRÅGA OM EN VÄRLDSOMSPÄNNANDE VÄLGÖRENHETSINRÄTTNING. DET FINNS
INGENTING SÅDANT:
— All verksamhet
attityd, tanke, åsikt, uppfattning, åberopande, mening, idé, hävd, inlägg, debatt, föreningsverksamhet
UTOM människovärdighetens explicita uttryckliga erkännande är och
förblir utövande förtryck
”EFTERSOM ERKÄNNANDET AV DEN INNEBOENDE VÄRDIGHETEN OCH AV DE LIKA OCH
OMISTLIGA RÄTTIGHETERNA FÖR ALLA MEDLEMMAR I MÄNSKLIGHETENS FAMILJ ÄR
GRUNDVALEN FÖR FRIHET, RÄTTVISA OCH FRED I VÄRLDEN”, K1UDHR10Dec1948.
är allt övrigt icke-frihet, icke-rättvisa, icke-fred:
satanistiskt, fascistiskt, nazistiskt djävulsdyrkande skit.
— Affärsvärlden har — snabbt 2010+ — glidit in i en föreställning att företräda en INDIVIDRÄTTSLIGT MANIPULERANDE AUKTORITET: klassiskt utövande fascism, på Bekväma Folkbesökta Internet.
OM TRADERA OCH ANDRA FÖRETAG VILL FORTSÄTTA PÅ DEN
VÄGEN ÄR DET DERAS ENSAK. MEN LÅT DET DÅ OCKSÅ STÅ SÅ: »Vi skiter fullständigt
i ”varje individ” att premiera kunskapen
om grundläggande mänskliga rättigheter med ”personlighetens
fria och fulla utveckling”». Visa det i klartext FRÄMST.
Tack. Jag deltar inte i någon nazistisk verksamhet. Vare sig den sker medvetet
eller omedvetet.
Tillfredsställelsen det ger att använda ett sådant verktyg, varje gång, har inga andra egna ord än dessa, veterligt: det utvecklar — hela tiden. Gnäller aldrig (Typ Microsoft&Google). Tjatar aldrig på en (Typ Microsoft&Google). Jävlas aldrig (Typ Microsoft&Google).
|
3D-nomenklatur För att framgångsrikt kunna arbeta med 3D-programmen, är det avgörande viktigt att först förstå vad programmakaren menar att de olika riktningarna betyder.
Bilden på tjejen är tagen ur en gammal tidning (i slutet
av 1990-talet) eller katalog som jag inte minns namnet på. Jag ber om ursäkt
för det. Jag hoppas hon inte misstycker att bli utnyttjad på det här oanmälda
sättet. MACz: PilotSystem ETABLISSEMANGETS OFTA ANVÄNDA
VEKTORKALKYLANPASSADE 3D-NOMENKLATURSYSTEM som kör över det enkla
pilotsystemets preferens:
Den mest naturliga preferensen för 3D-geometrin, pilotsystemet xyz, omnämns inte ens i den moderna etablerade matematiska nomenklaturen. Istället används ett s.k. högersystem** baserat på en SKRUVANALOGI som alltså kräver ytterligare förtrogenhet för lekmannen (**+z är den riktning »en högergängad skruv» stiger då den vrids positivt i xy-planet [samma som Z-planet i pilotsystemets termer]; –z i termer av pilotsystemet, alltså bakåt). DE TVÅ ENDA OCH MÖJLIGA ROTATIONSKOMPLEXEN (RotI&II) omnämns inte i den etablerade 3D-nomenklaturen — i varje fall inte i någon direkt uppenbart iögonenfallande mening. Naturlig konsekvens: förhållandevis FÅ personer känner sig dragna till ämnet, och även då endast under speciella (högst privata) föreställningar som den personen (naturligtvis) har SVÅRT att förklara för andra. Hela ämnet blir därigenom ”intuitivt” — därför att man inte känner metoden. |

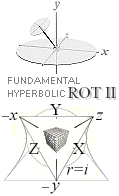
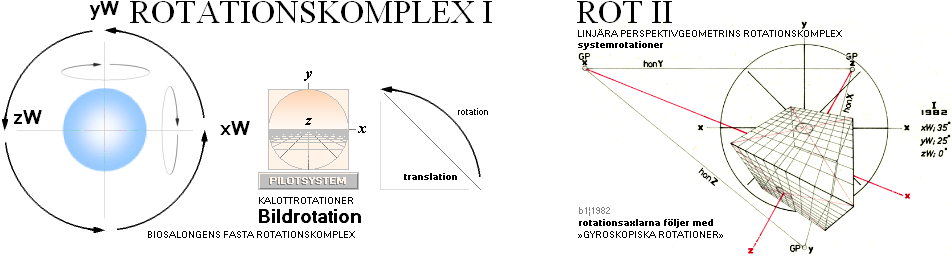
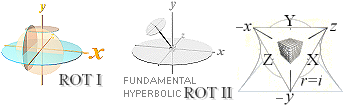
ROTATIONSKOMPLEX 1 OCH ROTATIONSKOMPLEX 2
ROTATIONERNA I 3D-GEOMETRIN
Ännu (November
2008) finns på @INTERNET ¦ WolframMathJan2019 ingen reguljär (eller någon alls) beskrivning av
rotationskomplexet i 3D-geometrin som beskriver de TVÅ enda och möjliga
rotationssystem som finns — i någon begriplig mening för en
icke-högskolefamiljär person. Här ges en fullständigt orienterande genomgång.
BILDROTATION
OCH SYSTEMROTATION
|
bildrotation
och systemrotation —
3D-geometrins rotationskomplex Se även i EQUIVALENCE OF ROTI AND ROTII
— beviset för att rotationssystemen är varandras omvändning med samma
värden BILDROTATION
OCH SYSTEMROTATION Se även utförligt i The ORIGIN OF ROTII. Ursprunget till ROT I är mindre dramatiskt: xy-systemet som sådant — Bion, Filmduken: 3D-geometrin innehåller TVÅ rotationskomplex: RotI och RotII. Den ordningen omnämns inte i modern akademisk litteratur. Rotationskomplex
I Rotationskomplex II Rotationsplanen i ROT I Koordinatsnurran i ROT II »picture rotation» system
rotation fasta rotationsaxlar rotationsaxlarna följer med
”PERSONLIGHETENS FRIA OCH FULLA UTVECKLING” [‡HÄVDEN] ¦ [‡Erinrad Bevisgrund] ¦ [A3] ¦ A22 ¦ A26.2 ¦ A29.1 är den enda universellt erkända existerande utvecklingsgrundval som finns för människan: Den enskilda individens naturligt hälso- och förståndsbefrämjande utveckling — på den erkända ”grundvalen för frihet, rättvisa och fred i världen”[‡K1¦UDHR10Dec1948]. KULTURELLT UTVECKLINGSEXEMPEL
1980+¦2000+: — ”Mjukvarujättarna” på Jorden övergår strax (2000+) till att använda Mänsklighetens som Försöksdjur i Driften att göra Stoa Vinster på Människors Allmänna behov av ”PERSONLIGHETENS FRIA OCH FULLA UTVECKLING”: — Se här StinaOlle. Vi har tagit fram jättefina Utvecklingsverktyg — MaskinenFörTextOchBild — som du Nu kan Köpa till förmånligt pris. Jättebra. Myrorna vallfärdar i enorma mängder till Honungsburken. Fullt jubel råder. — TEKNIKUTVECKLINGEN — med början från 4Bit 8Bit 16Bit 32Bit 64Bit ... — säkrade allt snabbare och större datorkraft. Jättebra. Men människorna som — förtjust — samlades till Honungsburken och BÖRJADE UTVECKLA DATORKRAFTEN GENOM PRAKTISKA TILLÄMPNINGAR lämnades — strax — strandsatta. — Med viss stingande smärta insågs snart att Individen Användes, Utnyttjades, som ett slags försöksdjur. — Vinsterna gick till utveckling av operativsystem med en allt mer tydligt framtonad STRÖMLINJEFORM — typ Microsofts SLARVORDLISTOR (WORD2000): —»Microsoft hjälper Dig Skita Bättre»: ”personlighetens fria och fulla utveckling”. Jättefint. — Mjukvaruindustrins ProfitParadis slog upp portarna — på vid gavel. Vi enskilda användare fattade ingenting — förrän långt senare. — ”Mjukvarujättarnas” Självutropade NyutGivna Bästsäljare ViÄrLedandePåIntelligens började strömlinjeforma användargrunderna: — ”Mjukvarujättarna” började utesluta — INTE »BAKÅTKOMPATIBILITERA» — en gång framställda och utgivna användbara utvecklingsverktyg, verktyg som Enskilda Individer redan hade använt, uppskattat, för Produktion enligt ”PERSONLIGHETENS FRIA OCH FULLA UTVECKLING”: »dom
där, därnere, är ju i vilket fall bara Försöksdjur, så vi har fria
marknadshänder att laborera som vi vill» — ”Mjukvarujättarna” började, så, införa en direkt dikterande användarroll för StinaOlle: »dom
där, därnere, är ju i vilket fall bara Försöksdjur, så vi har fria
marknadshänder att laborera som vi vill» — StinaOlle fann sig plötsligt, med viss förfäran — rösterna genom Webben, olika förskrämda och kvävda rop på hjälp mot mjukvarujättarnas nesliga fasoner, under Windows utvecklingshistoria (”Windows Sucks!”) — vara intvingade i en VÄRLDSOMFATTANDE DIKTERAD SAMMANSLUTNING — kapad — AV ”Mjukvarujättarna” (Restart your computer now, or we will do it for you, Microsoft Compatibility Telemetry ... Alla tidigare Windowsanvändare tvingas medverka ...). — ”Mjukvarujättarna” började, successivt, ta bort-utesluta-inte stödja tidigare väl fungerande utvecklingsverktyg. Microsoft
utestänger alla användbara fina 16-bitarsprogram med övergången till
32-bitarssystem: Simply 3D med flera utesluts; Microsoft
stänger plötsligt ner, utan förvarning, vidare användning av MsWORKS från
WindowsVista — rena datorkapningsverksamheten; Stavningskontrollen
i WORD2000 stängs för, får inte/kan inte användas längre; — Ett allt mer tydligt mjukvaruindustrins profitdrivande ANVÄNDARDIKTERANDE datorintresse gjorde sig märkbart. Datorer har också begränsad livslängd; — Datorn slutar fungera en dag — speciellt med Microsofts
påtvingade DatorKapningsVerksamhet: Mera intensiv processoranvändning
förkortar centralprocessorns livslängd: Processoranvändningen
60-70% — efter Den WindowsPåtvingade Stora Uppdateringen 2016 — från tidigare
10-12% på DVD-filmer: datorn kan inte längre, alls, användas för ändamålet —
Windows operativsystem har i princip upphört som ANNAT än en Kontrollerande
FångCell. — När datorn ger upp, upphör också möjligheten att använda DESS installerade programvara. Vi kan kopiera arbetsresultaten. Inte verktygen. Med den händelsen — i ljuset av JordiskaMjukJättarnas profitsamkväm — har utvecklingsverktygets programgrund också försvunnit. — ”PERSONLIGHETENS FRIA OCH FULLA UTVECKLING” blev föremål för KAPNING: Intrång. »dom
där, därnere, är ju i vilket fall bara Försöksdjur, så vi har fria
marknadshänder att laborera som vi vill» DEN ALLMÄNNA RÄTTSUPPFATTNINGEN är — också — KORRUMPERAD på samma boliner [‡HÄVDEN] ¦ [‡Erinrad Bevisgrund]. — Företagsamheten ges fria händer att genomföra i stort sett vad som helst — EFTERSOM varje annan ordning SÄRSKILT FÖR DET VÄRLDSLIGT ETABLERADE PROFITVÄNLIGA RÄTTSSYSTEMETS DEL innebär att BÖRJA inordna rättsutövningen enligt ”PERSONLIGHETENS FRIA OCH FULLA UTVECKLING”: domstolarnas inrättande UNDER, inte över, UDHR10Dec1948. Jämför: Europas Diktatur; RÄTTSSYSTEMETS DÖDSPSYKNINGAR MOT VÅLDSVÄGRARE. — ”Mjukvarujättarnas” intrång i mänskligheten ÄR brottslig verksamhet [A12]. ATTIDYD — hävd, åberopande — UTOM människovärdighetens erkännande är utövande förtryck [‡HÄVDEN]: Kulturlag. Kriminallag. Brottslag.
Rättslag. Utvecklingslag. Mänskligheten Feb2019 lever bevisligt, i många avseenden instängd i en Underjord — utan belysning: — »Aha. Så DU är intresserad av SEENDE. MyOhMy. DÅ vill vi, SEENDEÄGARNA, ha BETALT härnu ser du, för det som vi bestämmer att DU ska tycka ATT du TÄNKER är BRA, ser du, här nu, ser du. BETALA OSS». MICROSOFT Feb2019 erkänner inte mänskliga rättigheter som grundval för verksamheten. Absolut gärna rätta om fel. MICROSOFT
speciellt är alltid välkommet att visa sin version av praktiska exempel som
ansluter till ”PERSONLIGHETENS FRIA OCH FULLA UTVECKLING”. Visa. Blända oss.
Absolut. Windows 3.1+: den fria och fulla datoranvändningen utan intrång. OVANSTÅENDE
ILLUSTRATIONER
ansluter till författarens genomgång av de olika rotationskomplexen per
matematik. En mera utförlig beskrivning låg tidigare (Webb-originalförfattningen
från 2006) tyvärr (ännu) utanför ramen
för ämnets då korta presentation: 2006: Dock kommer här de mest
elementära delarna att genomgås så att läsaren själv längre fram kan hänga
med i sådana praktiska exempel som t.ex. omvandlingen mellan ekvatoriella och
galaktiska koordinater. Se särskild beskrivning i Solgalaktiska Koordinaterna. Nu Jan2019 har den vidare utvecklingen — sammanhanget i stort
— gjort det mera angeläget med en
något djupare presentation. Avsnitten här har utvidgats med ”mera kött på
benen” från originalarbetena (1976+) till 2006-originalets enklare kontext.
Den främsta anledningen: Den etablerade litteraturens fortfarande väl magra
beskrivningar i ämnet. |
FÖRUTSÄTTNINGAR ENLIGT Pilotsystemet xyz¦XYZ::
— Varje unik rymdpositionspunkt P(xyz) = R = √x2+y2+z2 kräver (minst) tre förflyttningar ΔxΔyΔz, translationer eller rotationer vilketsom, för att nå en ny unik rymdpositionspunkt x'y'z'. — Men endast EN translation, vilketsom, ELLER TVÅ rotationer DEKLINATION OCH RECTASCENSION krävs för att definiera en godtycklig unik rymdpositionspunkt P(xyz) relativt en given fast referens, t.ex. xyz-systemets positiva koordinataxel x:
BEVIS Rot I:
— Utgående från R=+x ger en yW-rotation en godtycklig RECTASCENSION (rektascensiv) placering i horisontalplanet; Med en ytterligare zW-rotation
DEKLINATION (deklinativ) placering tvärs horisontalplanet nås alla övriga sfäriska punkter P(xyz) med den givna sfäriska utgångspunktradien R=+x.
Minst
tre rotationer krävs för att flytta en given objektspunkt R=√x²+y²+z²
till en annan R-position R=√x’²+y’²+z’².
Rotationskomplex
I
— bildrotation.
En given punkt roteras (planförflyttas)
på sin rotationscirkel genom varje bild-koordinataxels fasta rotationscylinder.
Föremålet (varje punkt) roteras utifrån bildsystemets fixa systemaxlar.
Härledningen till rotationskomplex I begagnar den elementära trigonometrins
begrepp i pilotsystemet xyz och är därför förhållandevis enkel.
Rotationskomplex
II
— objektsrotation eller systemrotation.
Föremålet roteras utifrån sina egna
systemaxlar — som följer med i rotationen.
Härledningen till rotationskomplex II kan återföras på en ‘koordinatsnurra’[‡]
— en
stav med en cirkelskiva i änden på vilkens periferi den aktuella
koordinatpunkten Pxyz sitter.
|
Rotationskomplexen I och II förhåller
sig till varandra som varandras omvändningar: Se Rotationssatsen med (eng.) Beviset för samhörigheten RotI&II. Exempel: ROTI
....................... 45°zW,
30°xW, –15°yW ROTII
...................... –15°yW,
30°xW, 45°zW Samma värden, men i omvänd ordning. Slutpositionen blir i bägge
fallen densamma.
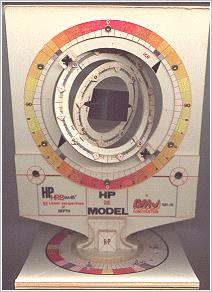
I studier av geometrin rekommenderas
(här) läsaren starkt att införskaffa sig en gyromodell typ ovanstående
författaroriginal (från Maj 1981): modellen är utskuren med passepartoutkniv
i 1mM och 2mM vit passepartoutkartong i enskilda cirklar. Hela anordningen
har sammanfogats med enkla egenkonstruerade kopparnitar, knappnålar,
vattenbaserat lim och 2mM skruv med mässingsmutter (fanns en gång i tiden på
Clas Ohlson). Samtliga cirklar är vridbara och roterbara. I mitten sitter en
axiellt vridbar kub. Skalorna har ritats med tusch, vattenbaserade färgpennor
och gnuggisar (numera en i princip helt utgången teknik som användes mycket
av många under 1970-talet), samt förseglats med fixativ för att ge ytan ett
plastiskt skydd mot fukt och damm. Man har (min erfarenhet) garanterat mycket
glädje av en sådan modell i olika trixiga analyser inom 3D-geometrin.
Modellen har hängt med författaren nu i 27 år — fortfarande till nytta. Satsen kan förstås direkt med hjälp av en (»enkel») gyromodell. Se vidare nedan i Rotationssatsen. Det rent matematiska beviset
är mera krävande och baseras på bevisande ekvivalens mellan de bägge ovan
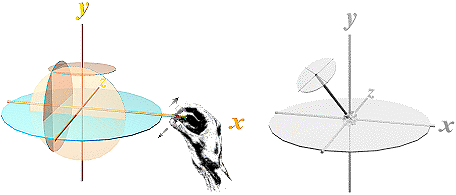
nämnda RotI&II. Beviset ryms tyvärr inte i den här framställningen. Se även utförlig praktisk tillämpning i Solgalaktiska Koordinaterna. RotI är som biosalongen och biobesökaren: betraktaren kan snurra objekt i
filmen genom ett fast (magiskt) salongssystem (RotI) med rotationsaxlarna xyz
och rotationsplanen XYZ: framifrån (zW), mellan händerna (xW,
bilden ovan vänster), ovanifrån (yW). RotII är biobsökaren inuti filmen: aktören — som själv följer med objektet i rotationen — kan rotera objektet med referens till någon av dess egna koordinataxlar xyz. Rotationsordningen i RotII är analog med den astronomiska koordinatbeskrivningen (se vidare i Solgalaktiska Koordinaterna). RotII
sammanhänger HELT med matematiken för den linjära perspektivgeometrin genom ENHETSHYPERBELN. Se vidare
beskrivning nedan, (samt vidare utförlig i HP-geometrin, ingår inte i denna
presentation). DE TVÅ ENDA OCH MÖJLIGA ROTATIONSKOMPLEXEN (RotI&II) omnämns inte i den etablerade 3D-nomenklaturen — i varje fall inte i någon direkt uppenbart iögonenfallande mening. Naturlig konsekvens: förhållandevis FÅ personer känner sig dragna till ämnet, och även då endast under speciella (högst privata) föreställningar som den personen (naturligtvis) har SVÅRT att förklara för andra. Hela ämnet blir därigenom ”intuitivt” — därför att man inte känner metoden. |
|
|
|
|
|

|
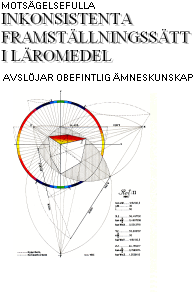
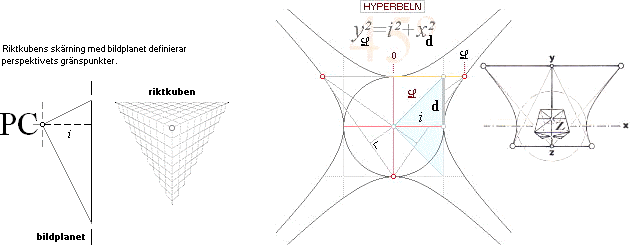
Den linjära perspektivgeometrins grunder enhetshyperbeln — Linjärperspektivens definition genom HYPERBLER som bildar
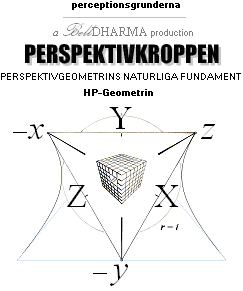
perspektivets motsvarande HP-kropp: HorisontalPerspektiv-kroppen [HP-kroppen] DEN LINJÄRA PERSPEKTIVGEOMETRIN kan syntetiseras på ENHETSHYPERBELN med RIKTKUBEN i origo — centrum, »mitten». i bildindex
— L horisontalindex
(orig. L Horisontalekvationen Horisontalteoremet d = tanW·i
Horisontalekvationen.
Gränspunkten för en linje som är vriden i planet vinkeln W grader har från
horisontens normal avståndet tanW·i. Nedanstående riktkubsmodell är byggd i Anim8or — men det är närmast oerhört krångligt att få den att fungera efter programmets tänkta funktioner. Kuben drar t.ex. iväg Gud vet vart om man försöker med Ctrl+Z efter en genomförd rotation, samt det faktum att DET läget INTE blir det ursprungliga. Jämför Simply3D som en gång fanns i Windows95-miljön: enkelt, OCH rena drömmen jämfört med Anim8or. NOTERING NOTERING, MODERN AKADEMISK LITTERATUR OCH NOMENKLATUR Riktkuben tycks vara ett helt okänt begrepp i moderna kretsar: |
|
Ingenting av det ovan nämnda
står att läsa om i den befintliga bibliotekslitteraturen. Olika författare som försöker beskriva linjärperspektivet talar om typerna ”enpunktsperspektiv”, ”tvåpunktsperspektiv” och ”trepunktsperspektiv”. Dessa motsvarar HP-geometrins ”en kub sedd rakt framifrån”, ”en kub vriden horisontellt” och ”en kub vriden godtyckligt”. Men riktkuben beskrivs aldrig i etablerade kretsar då man (tydligen) inte känner till linjärperspektivens (enkla, men omfattande) sammanfattande matematik. Se även Lagerqvistsyndromet till jämförelse. |
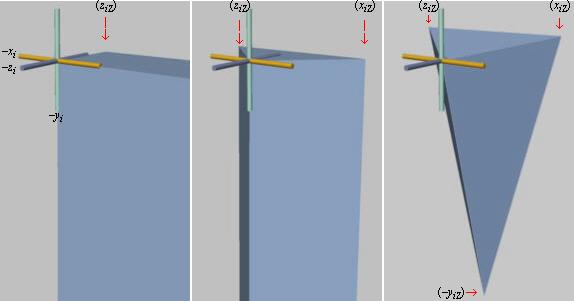
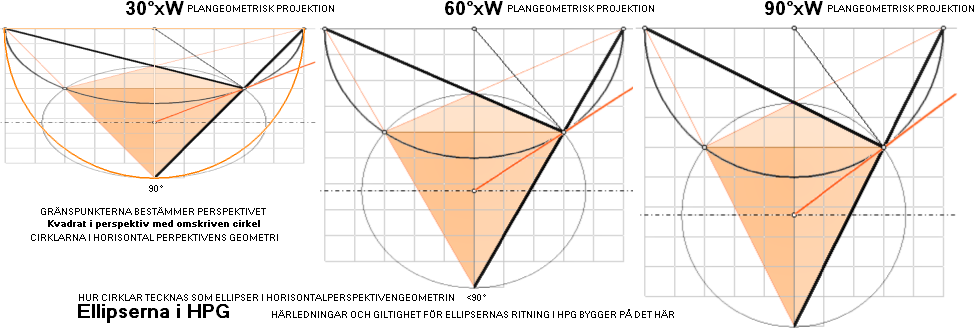
Riktkubens skärning med bildplanet definierar
perspektivets gränspunkter. Illustrationerna visar i tur och ordning en gränspunkt, två gränspunkter, tre gränspunkter. |
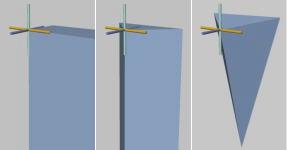
LINJÄRPERSPEKTIVETS GRÄNSPUNKTER
RIKTKUBEN
SOM FORMBEGREPP FINNS INTE I FENOMENVÄRLDEN — ENBART I FÖRSTÅNDS- OCH
FÖRESTÄLLNINGSVÄRLDEN:
—
Riktkubens formdel framträder direkt som HP-kroppens tre signifikanta horisontplan XYZ med sina tre
signifikanta perspektivistiska gränspunkter xyz.
— Vi
SER riktkuben alltid perspektivistiskt i föreställningsvärlden genom den
uppritningen: kubhörnet som genomtränger bildplanet:
—
Planet i bakgrunden är bildplanet (BP), (de tre) genomskärningspunkterna
genom BP anger perspektivets gränspunkter för koordinataxlarna xyz.
Metoden
med CHEOPS
REKTANGEL (ab=c2)
hjälper oss sedan »med resten»:
NERVIKNING Av varje (XYZ) horisontalplan för sig PÅ räta vinkeln
definierar DET horisontalplanets horisontalINDEX (horisontens
indexlängd ![]() ):
):
— Det
ger oss Gränspunkternas motsvarande rätvinkliga VÄRDEN (i grader eller metriska
kvantiteter). Och vilka referensvärden sedan kan användas för att alternera —
rotera — olika plandelar perspektivistiskt korrekt — med tillhörande nya
gränspunkter med motsvarande avritningar, och så mycket Artisten står ut med.
Det är bara fantasin och TIDEN som sätter gränser. Principerna är givna — och
ytterst enkla.
»CENTRALEN»
— primära BildIndex i —
kan
vi alltid ta ut via den ytterst enkla Metoden med CHEOPS REKTANGEL:
—
Direkträkning med de bägge horisontdelarna (a och b, eller h och H) hH=i2
— här 2·8=16; i=4 — eller genom direkt geometrisk användning av räta
vinkeln (grå) som antyds i figuren ovan.
—
EFTERSOM — matematiskt, nervikningen via Cheops Rektangel med Pythagoras
Sats —
![]() 2 = i2 + d2 där också d/i = tanW° = 2/4=0,5
—
2 = i2 + d2 där också d/i = tanW° = 2/4=0,5
— ![]() -horisontens
aktuella uppvridning i exemplet med d = i· tanW° — får vi
-horisontens
aktuella uppvridning i exemplet med d = i· tanW° — får vi
![]() 2 = i2 + i2tan2W°
= i2(1 + tan2W°) som ger oss
2 = i2 + i2tan2W°
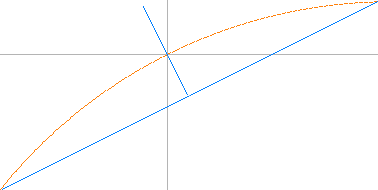
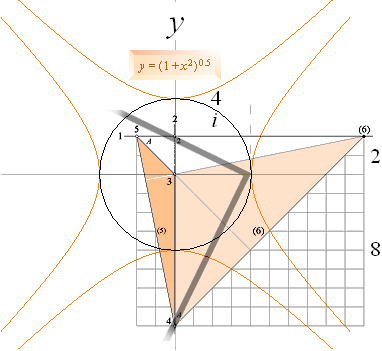
= i2(1 + tan2W°) som ger oss ![]() = i√ 1 + tan2W°,
ser vi — nu — att x-FUNKTIONEN för tanW°-värdet ekvivalent,
= i√ 1 + tan2W°,
ser vi — nu — att x-FUNKTIONEN för tanW°-värdet ekvivalent,
![]() = i√ 1 + x2
uttrycker ENHETSHYBERBELNS EKVATION, den ovan avbildade orangea kurvformen som
ser likadan ut uppvänd och tvärvänd (hyperbelns asymptotvinkel = 45°).
= i√ 1 + x2
uttrycker ENHETSHYBERBELNS EKVATION, den ovan avbildade orangea kurvformen som
ser likadan ut uppvänd och tvärvänd (hyperbelns asymptotvinkel = 45°).
—
Enhetshyperbelns kurvform definierar HP-kroppens perspektiva gränspunkter genom
den så härledda ekvationen för HORISONTALTEOREMET:
![]() = i√ 1 + tan2W°
= i√ 1 + (d/i)2 ..... horisontalteoremets ekvation som tydligen definierar hela
perspektivgeometrins totala fundamentala LINJÄRA PERCEPTIONSKROPP.
= i√ 1 + tan2W°
= i√ 1 + (d/i)2 ..... horisontalteoremets ekvation som tydligen definierar hela
perspektivgeometrins totala fundamentala LINJÄRA PERCEPTIONSKROPP.
![]() = 4√ 1 +(2/4)2 = 4√
1,25 = √20 = 4,472135955.
= 4√ 1 +(2/4)2 = 4√
1,25 = √20 = 4,472135955.
Effektvinkeln
för övre (Y-) horisonten beräknas med endera sidan h 2-5 eller H 2-6 som
TANeffW = h¦H/![]() .
Här skulle värdena bli
.
Här skulle värdena bli
TANeffWh
= 2/√20 ¦ 24,09°
och TANeffWH = 10/√20 ¦ 65,91°.
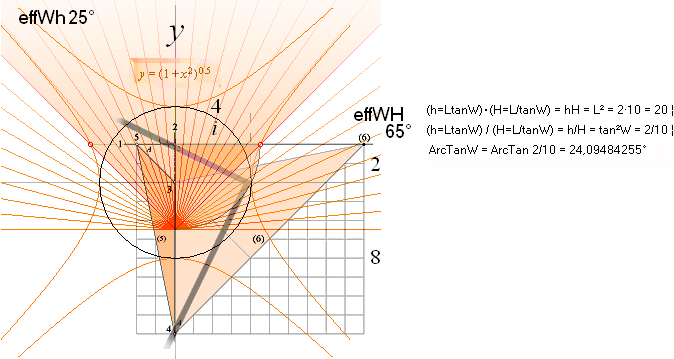
VinkelSolfjädern
— konv. gradskiva — säkrar kontrollen på korrekta/rimliga beräkningsvärden.
— HP-KROPPEN är en ren elementär
uppvisnings NATURSKOLA i — befrämjande — matematikövning och dito färdigheter
av typen »rena spöregnet».
— Det finns »hur mycket som helst» ELEMENTÄR matematik och
geometri att öva på i ämnet för den som vill och har tid.
PREFIXxSIN
— »Trigonometrins Artistiska förenkling», se särskild artikel.
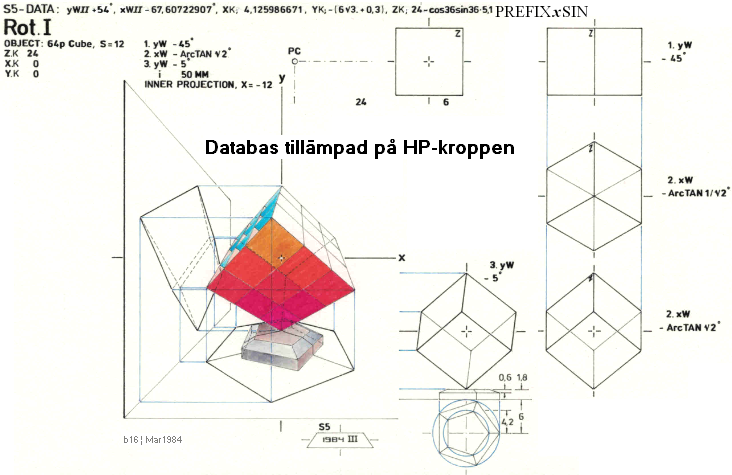
HorisontalPerspektiv-exempel
från 1984 — »databas
söker lämplig perspektivvy».
— Den här författarens referens: DEN typen av rent
artistiskt arbete jämfört med REN DATORPROGRAMMERING (för 3D-applikationer) är
TVÅ VITT SKILDA VÄRLDAR.
ARTISTERIET är det
»man längtar efter mest». Medan datorarbetet »visserligen är jäkla askul» — men
i grunden VÄLDIGT (väldigt) andefattigt.
— Man måste ta paus emellanåt, åka eller gå ut i Naturen för
att Hämta Andan. Annars dör man ihjäl — långsamt.
»BÄSTA
KOMPROMISSEN»: Egna (grund-) teckningar som skannas in till dator och som KAN
manipuleras eller presenteras vidare, typ från ovan:
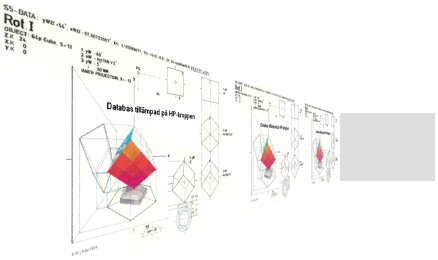
Förslag till
Väggmålning i Stadsplaneringen — glaserat Tegel — för främjandet av en mera
matematikintresserad befolkningskultur ...
— Den typen är MYCKET ROLIGARE att arbeta med.
— TÄNK en hel STAD som är PROPPAD med den typen, alla stora
öppna väggytor, liknande eller annat passande, med beskrivande, undervisande,
upplysande matematisk geometri — i alla typer av olika blandningar. Wao.
»GrafittiKultens Återkomst». Elementär Undervisning. Alla Turister är välkomna.
Kulan och
Plattformen — Blyerts 1988 — illustration till Mekaniken-Kinetiken: rörelsens elementära
natur — OCH perspektivlärans grunder. TIDLÖST.
ALLA TECKNINGAR
FRÅN FÖRFATTARENS PRIVATA ARKIV — samlingskollage som beskriver
perspektivtecknandets två huvudkomplex: linjärt
och sfäriskt.
Efter
erfarenhet och studium
OAVSETT FÖREMÅLET FÖR
ARTISTERIET finns alltid undantagslöst EN och endast EN enda ÖGONPUNKT eller
PERCEPTIONSCENTRUM för varje möjligt UPPFATTAD vy eller BILD:
— Uppåt, neråt, åt höger,
åt vänster, är alla väl intuitivt givna riktningsled som tecknandet — för EN
given blickpunkt — tvunget och oåterkalleligt måste ta hänsyn till och utgå
ifrån.
— VET MAN INTE DET
UNDERLIGGANDE REGELVERKET framstår också resultatet med EXAKT den framtoningen.
Varken mer eller mindre — som också kan medföra »väldigt engagerad bildkonst»:
— »Ju mindre vi VET,
desto Bättre framtidsutsikter».
De bägge grundkomplexen LINJÄRT
och SFÄRISKT kan utvidgas godtyckligt
för den som (så) känner geometrin för andra projektionssätt: det finns ingen
gräns för den kombinatoriken annat än den egna fantasin. Rekommenderas starkt —
oerhört personlighetsutvecklande: individens unika särart; Rita. Spela. Dansa.
Hantverket. Artisteriet. Tekniken. Instrumenten. Byggnaderna. Naturen.
Kulturen.
— Med
Primära och sekundära bild- och horisontalindexen så givna, och den enkla
metoden för att konstruera, eller beräkna direkt genom Cheops Rektangel (ab=c2) är — SÅ — hela
perspektivkomplexet tydligen FULLKOMLIGT KOMPLETT GENOMLYST. Det finns
inget mer att tillägga eller förklara eller beskriva. Resten blir rent ritarbete,
så mycket Artisten vill, kan och förmår: VRID, rotera, markera, beräkna, ta ut,
och RITA. Alla kombinationer är tillåtna — från ett fast givet BildIndex i,
den centrala bildpunkten som hela bilden, eller vyn, ses FRÅN.

HP-kroppen med
primära baslägen utan effektvinklar.
SUCCESSIVA
ROTATIONER xyz¦W° utifrån en given horisont (XYZ) blir i (en delvis
krävande men ytterst intressant) sammanställning av formen (bildlänk till
större, med separat beskrivning från The Origin of Rot 2 och The Horizontal Theorem )
med
angivna s.k »effektvinklar» — vinkeländarna (»restvinklarna») som ligger
utanför hyperbelkurvorna. Sammanställningen genomfördes för min del Jul1981 med
en senare (1998 Equivalence of Rot1 and Rot2) sammanställd härledning som visar hur de bägge
rotationskomplexen ROT I och ROT
II
är
varandras omvända ordningar — tagna med samma värden.
— Som
det har visat sig: Vi hittar inte sucken i etablerad litteratur — ehuru
ROTATIONSMATEMATIKEN där emellertid som vi redan noterat är väl
kommersiellt tillämpad. I modern akademisk mening döljer sig komplexet bakom
ytterst abstrakta detaljer som världens ledande PhD-hövdingar tydligen inte kan
beskriva rationellt för populationen vanliga fotgängare. Se exemplet från WOLFRAM
Math Jan2019.
MOTSVARANDE DATORRELATERAD BESKRIVNING
|
DATORRITNING DIREKT PÅ
HP-GEOMETRINS DETALJER[‡] förekommer inte i datorvärlden. Inte alls — här veterligt. — »3D-riket» i
datorvärlden (successivt med teknikutvecklingen från 1980+) behärskas
istället av det betydligt enklare rent matematiskt-algebraiska ROT1-komplexet, dess smidiga och hutlöst snabba matematik. RitARTISTERIET har på
den utvecklingsvägen kommit (något) i skymundan: folk numera (Feb2019) RITAR
inget. Bokhandlarna har för länge sedan avverkat det breda, och fina,
ritsortiment som en gång fanns med sin guldålder strax före datorrevolutionen
(1980+). Men vänta bara ska du
få se: Människor kommer att tröttna UR på den tomma, ytliga, elektronikbilden
och börja LÄNGTA efter The Real Steel — förr eller senare. Ingen dator kan
mäta sig med ett mänskligt individuellt artisteri; penna papper, enkla
ritverktyg, kunskap, glöd. ENERGIN det GER saknar ord. PRINCIPEN FÖR DatorMatematisk presentation
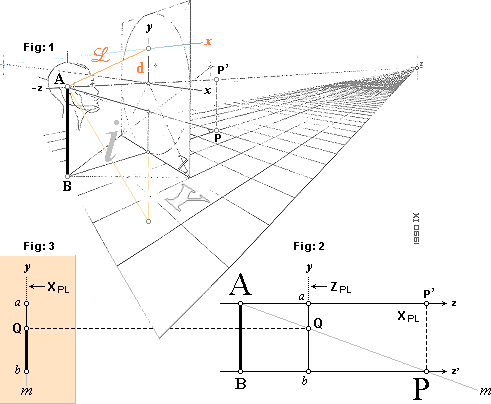
av linjärperspektivets gränspunkter Betecknas riktkubens koordinataxlar med (xyz)i, blir deras skärning (xyz)iZ med bildplanet (Z) detsamma som linjärperspektivets gränspunkter P(xyz)iZ med respektive bildkoordinater xy enligt P(xyz)iZ[xy]. Totalt med positiva och negativa riktningar ges alltså 6 gränspunkter (max 3 synliga) med 12 koordinatvärden (max 6 synliga).
PRINCIPBESKRIVNING: Man får xy-koordinaterna för perspektivets gränspunkter P(xyz)iZ genom att ange riktkuben på enhetsform med x=y=z=1. Efter genomförda rotationer ges sedan gränspunkternas bildkoordinater [xy] i P(xyz)iZ[xy] direkt genom BILDEKVATIONEN — från xyz-rummet till xy-bildplanet — enligt {x|y}=i{xP|yP}/zP med (xyz)P från rotationerna av riktkubens enhetsform x=y=z=1, och {x|y} motsvarande respektive x och y i den sammanförda beteckningen [xy]. Rotationernas reguljära matematik beskrivs utförligt i Rotationerna i 3D-geometrin. Rotationernas geometri beskrivs översiktligt i 3D-geometrins rotationskomplex. 3D forts. Gränspunktssatsen:
— retoriskt Gränspunkten för bilden av framänden på alla möjliga linjer i golv
och takplan som sträcker sig mot oändligt, sammanfaller med bilden av
huvudpunkten (a i fig:2) på z-axeln.
Bildindex i anger avståndet mellan
perceptionscentrum (PC, »filmprojektorn», betecknat A i figurerna 1 och 2
ovan) och bildplanet (»bioduken», betecknad Zplanet i figur 2). Perspektivets styrka beror inte på i utan på den upptagande
synvinkeln mellan PC och objekten:
Stora upptagande synvinklar motsvarar
»bilder av jättestora objekt», medan små synvinklar ger ett alltmer
plangeometriskt (»perspektivlöst») intryck. Bildcirkeln i och PC bildar alltid
en synkon med 90° nittio graders upptagande synvinkel. Det avbildade konceptet (salongen i figur 1) illustrerar den
åskådliga härledningen till gränspunktssatsen inom perspektivgeometrin. Begreppet framgår syntetiserat genom figurerna 2 och 3. |

|
3D forts.
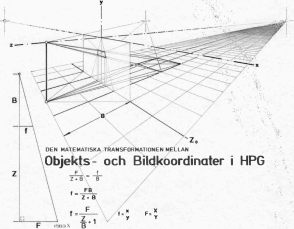
Okt1983 Bildekvationen
— Från 3D till 2D Alla rådata som beräknas av ett 3D-program måste i slutänden omtransformeras till endast två koordinater xy på bildskärmen. För det linjära perspektivets del sker den transformationen med hjälp av en speciellt enkel bildekvation. Den används också i omtransformationen för sfärperspektivet i en något modifierad form, se föregående 3D-geometrins 3 punktfält. Oavsett typ av perspektiv (linjärt, sfäriskt, eller annat) måste slutbilden alltid, i vilket fall, relateras till en plan bildyta typ bioduk eller bildskärm. Genom att linjärperspektivet innehåller just den elementära planytans absolut mest elementära element, blir också bildekvationen nedan grundform för alla typer av perspektiv.
explicit: fx= x = i([X+X.K]/[Z+Z.K]) kx=X+X.K fy= y = i([Y+Y.K]/[Z+Z.K]) ky=Y+Y.K BILDEKVATIONENS
ENKLA RÅFORM är xi=ix/z, yi=iy/z. Bildekvationen återför rums-
eller objektspunkten (xyz)P från perceptionscentrum (PC) på bildplanet
i dess två koordinater (xy)i. Genom att utnyttja en kropps egensystem
(XYZ)K som är placerad i rummet i (XYZ)0 förenklas
transformationerna enligt sambanden ovan för kroppar bestående av stora
punktmängder — så som det ju också är i den datorstödda 3D-geometrins
värld. |
|
Rotationerna i 3D-geometrin 3D-ROTATIONERNAS STORA TILLÄMPNINGSOMRÅDE: SNABBA DATORBASERADE PROGRAM MED STORA PUNKTMÄNGDER HUR ROTATIONERNA I 3D-GEOMETRIN UTFÖRS I PRAKTIKEN Se mera utförligt i exempel
i sammanställning i Rot1Prepared
SAMMANTAGET FÖRENKLAT: vidare mera utförligt i samband i Prepared: ——————————————— Alla punkter i den strikt matematiska behandlingen av 3D-geometrin roteras utan undantag genom Rotationskomplex I. Rotationsaxlarna xyz har rotationsplanen eller rotationscirklarna XYZ. Med utgångspunkt i Z-planet — koordinataxlarna xy —
roteras en given punkt P(xy) enligt sambanden från vinkelsummateoremet. Rotationen av P(xy)
blir i PREFIXxSIN för zW x := x sinW – y cosW y := y sinW + x cosW xy i HL (förkortning för HögerLed) är objektskoordinaterna och xy
i VL är de resulterande från rotationen W. Ordningen för rotationerna xW
och yW fås på samma form genom att insätta resultaten för xy i
faktorerna zy för xW och xz för yW. Exempel i PREFIXxSIN: Punkten P(–1=x; 0=y; 0=z) — P(–1,0,0) — roteras –(asin 3/5)yW med sinW=3/5=0,6 och cosW=4/5=0,8 (vi minns att sin–A=+sinA); termerna xy i Z-planet motsvarar termerna xz i Y-planet så att man får: x := (–1)(3/5) – 0 cosW =
–0,6 z := 0 sinW + (–1)(–4/5) = 0,8 Punkten P(–0,6=x; 0,8=z; 0=y) roteras sedan –(90°)zW som ger: x := (–0,6)(0) – 0 cosW = 0 y := 0 sinW + (–0,6)(–1) = 0,6 Punktkoordinaterna är då P(0=x; 0,6=y; 0,8=z) Mera utförliga exempel ges i Solgalaktiska Koordinaterna. Mycket mer finns
att beskriva och illustrera i 3D-geometrins grunder. Det som
framställts ovan är endast de absolut viktigaste grundbegreppen som krävs för
att kunna hänga med i 3D-beskrivningar generellt. Se även
efterföljande Rotationssatsen. |
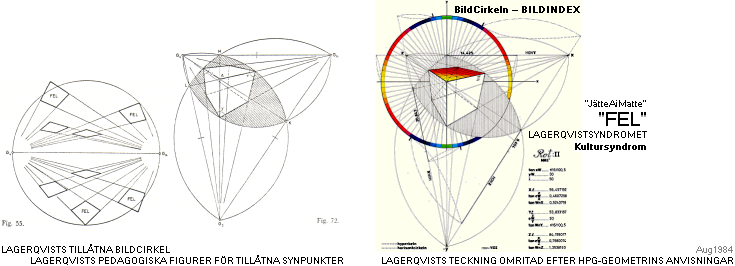
Lagerqvistsyndromet — infört
11Okt2011 från doc-originalet KALKYL_MsWORKS.doc, HP-GEOMETRIN s86, med tillägg.
LAGERQVISTSYNDROMET
LAGERQVISTSYNDROMET — se även i Comparing Examples
Små observatörer inför stora objekt
Hur man
framställer läromaterial som bygger på — här bevisligt IRRATIONELLT OLOGISKT INKONSISTENT
— felaktigt uppfattade kunskapssammanhang
— Bokförfattaren Lagerqvist[‡] PERSPEKTIVLÄRA Bonniers 1964 — i en här
tydligt bevisbart omfattande kollegial[‡] kultur av vanföreställningar och vidskepelser
om perspektivgeometrins elementära grunder — påstår på flera ställen[‡Fig.55¦72] utan redovisad anledning, skäl, eller orsak
att perspektivkvadrater med främre kvadrathörnet mot betraktaren som visar
mindre, eller lika med 90 grader, är "FEL" och ”orimligt”.
LINJÄRA
HP-syndromet — RÄTT är FEL: FEL är RÄTT ¦ Tillägg
13Feb2019:
Boktexten anvisar ett — streckat i bokfiguren 72 — ”tillåtet
område” för perspektivteckning
ӊr det
teoretiska området för en bildframställning med hjälp av trepunktsperspektiv”.
— Bokförfattaren känner tydligen inte — riktigt — till
perspektivgeometrins grunder: Samma perspektivteckning förtydligad i omritad
version (1984) — ovan höger enligt HorisontalPerspektivGeometrins anvisningar,
som visar och bevisar att bokförfattaren uppenbarligen har en högst begränsad
uppfattning om ämnets sakinnehåll.
— HorisdontalPerspektivGeometrins grundligt härledda matematik[‡], som f.ö.
inte alls ingår i boktexten, visar och bevisar, detaljerat, att
bokförfattarens påståendeformer är självmotsägande: I ena delen (55) är del
”FEL” att rita ut detaljer utanför BildCirkeln: I andra delen (72) är det
tillåtet — uppenbarligen helt utom bokförfattarens egen medvetenhet, av flera
olika skäl: 1. HPG-matematiken är tydligen okänd. 2. Principen för hur Cirklar
i HorisontalPerspektivGeometrin presenteras, visas och bestäms, tydligen helt
okänt i moderna kvarter:
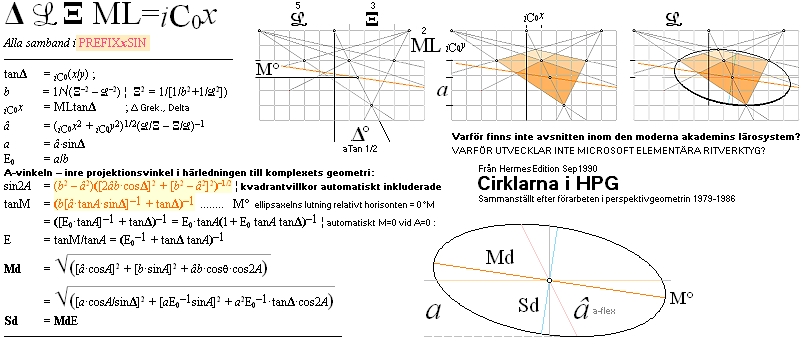
Cirklarna — ELLIPSERNA — i
LinjärPerspektiven — Feb2019: Cheops Rectangle
—
Varför ingår inte ovanstående i den moderna akademins lärosystem: böcker,
artiklar, uppsatser? — What’sUp? Eftersökt. Inte upphittat. ´at’sUp?
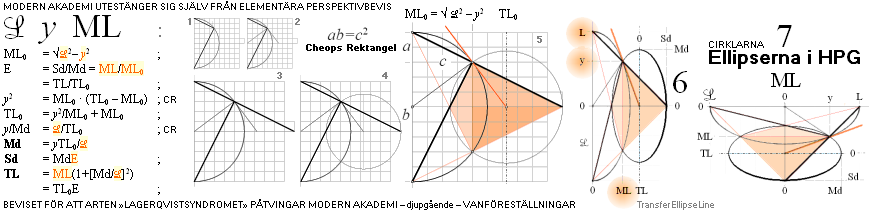
— Sambanden framgår direkt ur den enkla plangeometriska
figurformen via Cheops Rektangel. Ellipser vid sidan av
mittlinjen, nedan, härleds sedan »på samma form» men något mera sammansatt,
sammanställningen nedan.
Härledningarna till nedanstående finns nu
Mar2019 i PEPS. Efter förarbeten 1976-1986.
— Två Kalkylkort
för Ellipsberäkningarna finns sammanställda i Tabell 7 i GyroDec2018.ods.
—
Vilken är själva anledningen till ATT modern akademis lärosystem INTE tar upp
ämnesområdet i böcker, artiklar, uppsatser? — What’sUp? Eftersökt. Inte
upphittat.
—
What’sUp? Eftersökt. Inte upphittat — utom här i Universums Historia: Cheops Rektangel.
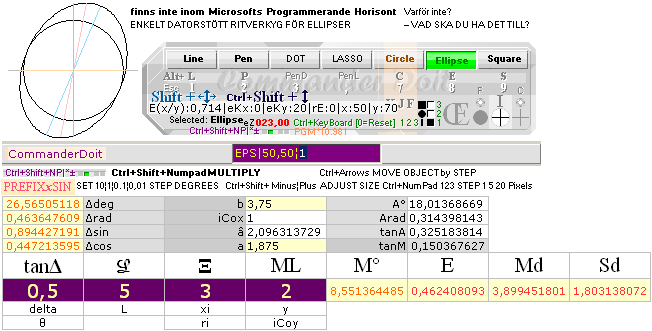
How
is it that THESE, this specific type, of simple and elementary precision
drawing tool NEVER was developed by Microsoft — to PROMOTE A GENERAL EDUCATIVE
POPULATION OF ENLIGHTENED PEDESTRIANS on Planet Earth: — What’sUp? Ahhgaad.
— A simple Electronic
calculator will do just fine — with a traditional Ellipsograph: not in production any more. Earth Lived: Earth Died.
— Den KULTUR som Modern Akademi byggt upp 1800+: Vad — exakt —
ÄR det för något i mänsklighetens samlade kulturhistoria, egentligen?
Det ena området efter
det andra framträder ur NATURBOKEN med högst elementära avsnitt — helt orepresenterade
i MAC. What’sUp?
— Är det någon som, nyligen, påstått att Mänskligheten nu
(Feb2019) lever i Underjorden — UTAN belysning?
Härledningarna[‡] BYGGER på ATT BasCirkeln med Horisontens
Bildindex (Cheops Rektangel) rent perspektivistiskt omsluter ett
utpräglat spetsvinkligt SETT mot betraktaren vänt kvadrathörn. Det är hela
”hemligheten” bakom SÄTTET att kunna teckna in exakt cirkelrepresentation i
linjära perspektiv.
— 30°xW-versionen — till jämförelse — visar den motsvarande tillåtna
LagerqvistSyndomatiska perspektivvyn, basvyn uppvikt plangeometriskt 60°.
Ämnet
står HELT orepresenterat i bibliotekslitteraturen, här veterligt:
— CITATGRUNDEN HÄR är
möjligen ”HelYlleSvensk”, och därmed kanske särskilt vinklad för Sveriges del: växande kalhyggen 1800+. Hur det ser ut i bibliotekslitteraturen i övriga Världen är
här mindre känt. Viss WebbKoll (13Feb2019) visar att den Engelska befolkningsdelens
perspektivteckningar, i en del fall, ser ut att vara mindre imponerad av
Lagerqvists rekommendationer. Men inget ytterligare är här känt om den rent
teoretiska (akademiska) historiska lärogrunden i ämnet ”perspektivlära” (Det
krävs 7 veckors sträckläsning på tillgänglig BOK-litteratur, minst).
Det
moderna akademiska lärosystemet ger inget omnämnande; Detaljerna som ovan
omnämns inte — explicit. Eftersökt. Inte upphittat.
— Vi vet inte varifrån bokförfattaren har fått sin uppfattning:
"...mot betraktaren vända
hörn placeras utanför cirkelns periferi blir det spetsvinkligt — alltså mindre
än 90° — vilket är orimligt. Framställt i perspektiv måste detta hörn under
alla förhållanden bli trubbvinkligt, dvs. mer än 90°. Även att placera hörnet på
cirkelperiferin, varvid vinkeln blir exakt 90°, är alltså felaktigt.",
" ... skulle bli spetsiga,
vilket vore orimligt. (Redan att de i en perspektivbild är räta, är en
orimlighet. De måste under alla förhållanden bli trubbiga, se fig. 55.)",
s28-29, PERSPEKTIVLÄRA Lagerqvist 1964.
LAGERQVISTSYNDROMET
är här benämningen på en (Svensk) tydligt kollektivt, detaljerat
bevisbar, modernt akademiskt rent VISUELL kollegial — utlärd från någon
undervisningsstol — vanföreställning av okänt ursprung. Vanföreställningen har,
tydligen gått i arv från någon här inte närmare känd källa, och som lika
tydligt INTE kan relateras eller beskrivas eller förklaras:
— ”orimligt!”, ”FEL”: saknar referenser.
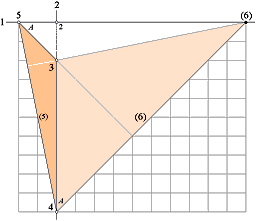
Figur a vänster visar ett snedställt kvadratiskt rutnät (K) i Z på i från PC. Kvadratens diagonal har satts lika med 2i (i anger BILDINDEX, se ill. Perspektivgeometrins grunder).
Figur a höger: Linjärperspektiven kan INTE ändra den plangeometriska egenskapen för figurer i rumsplan som är parallella med bildplanet Z. Sådana figurplan motsvarar snitt i plana synkoner och kan bara visas större eller mindre beroende på avståndet till PC.
Figur b visar vad som händer för varje minsta uppvridning av KVADRATEN kring x i Figur a.
— Testa att föra hörnet på ett papper (försiktigt) mot ögat, nära. Spetsvyn typiskt i Figur b är precis den bildvy som då framträder.
— För vi hörnet
på ett papper helt nära ögat, är det just precis en MYCKET spetsvinklig
perspektivbild som framträder av papperets rätvinkliga hörn. Precis av den typ
som visas i Fig:b.
— Varför skulle
den typen av vy vara ”orimlig”?
— Vi ser SÅDANA
vyer, alltid, med SMÅ observatören NÄRA STORA objekt.
— Varför skulle
den typen av vy vara ”orimlig”?
— Och varför
påstå sådant, utan att tala om varför?
— What'sUp?
Någonstans i den dimmiga historien finns
svaret.
Ju närmare K-spetsen (P) kommer PC i uppvridningen, desto längre och spetsigare blir HP-bilden i Z av P|x. Med P exakt i PC, försvinner bilden av K som då göms i Y-planet av x.
— Exemplet illustrerar den linjära perspektivbild man ser ju närmare man kommer (mycket) stora objekt.
Jämför modern akademi:
Lagerqvists påståenden till
figurerna 55 och 72
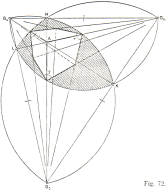
Figurerna [55][72] nedan är inskannade och här förminskade
original från bibliotekslitteratur
PERSPEKTIVLÄRA, Erik
Lagerqvist, Bonniers 1964, s28-29 (Fig. 55), s36 (Fig. 72);

Bokens figurtext
(färgmarkeringar i texten är mina egna):
Vä: Fig. 55
”Föremålets placering i höjdled,
nedanför eller ovanför horisonten, sker
givetvis efter eget gottfinnande, dock
må man se till att ingen del
av föremålet kommer utanför cirkelns periferi. Avbildar man t.ex. en snedställd kvadrat
på ovanstående sätt (fig. 55) och dess främsta, mot betraktaren vända hörn
placeras utanför cirkelns periferi blir
det spetsvinkligt — alltså mindre än 90° — vilket är orimligt. Framställt i perspektiv måste
detta hörn under alla
förhållanden bli trubbvinkligt, dvs. mer än 90°. Även att placera hörnet
på cirkelperiferin, varvid
vinkeln blir exakt 90°, är alltså felaktigt.”
Hö: Fig. 72
”Den gemensamma ytan HKL av de därigenom uppkomna cirkelsegmenten är det teoretiska området för en
bildframställning med hjälp av trepunktsperspektiv. Skulle bilden — t.ex. kuben i fig. 72 — sträcka sig utanför detta område,
innebure detta att hörnvinklarna u, v och y skulle bli spetsiga, vilket vore orimligt. (Redan att de i en perspektivbild är räta, är en orimlighet.
De måste under alla förhållanden bli trubbiga, se fig. 55.)”
Varför påstår
bokförfattaren ”FEL”, ”orimligt”, ”alltså felaktigt”, ”en orimlighet”?
— Vi har nyligen[‡]
konstaterat att det I PRAKTISK VISUELL VERKLIGHET inte föreligger något hinder
att betrakta »stora föremål på nära avstånd» i en bildform av just en utpräglad
spets för rätvinkliga hörn: ett pappershörn nära ögat. Så, vad kommer sig
ovationerna? What’sUp?
Notera först och främst att författaren, tydligen, inte motiverar sina, tydligen lika, strängt hållna påståendesatser angående
”utanför cirkelns periferi” och
”orimligt” och
”under alla förhållanden”, och
”det teoretiska området”.
Anledning:
— ÄVEN i det att författaren, tydligen, INTE känner till DEN LINJÄRA PERSPEKTIVGEOMETRINS ÖVERGRIPANDE HP-kropp, BORDE han ha förstått så pass mycket av ÅSKÅDNINGSGRUNDERNA (titta ner på Jorden och tänk en vridbar kvadrat inuti Jordsfären, figurerna ab ovan) att han kunnat bespara LÄSAREN de tydligt befängda ’auktoritetsmeningarna’ ovan. Lagerqvists märkliga, helt orelaterade, påståenden till figurerna 55 och 72.
— Med andra ord: författaren har av ej närmare känd anledning tydligen (för det första) ärvt en ’omöjlighetsmening’ från någon (äldre) ’lärare’ och som tydligen grundas på en direkt OKUNNIGHET om på vilket sätt, och hur, den linjära perspektivgeometrin sammanhänger. Nämligen genom HP-kroppen:
— Modern akademi känner uppenbarligen inte till perspektivgrunderna.
Vi studerar det — vidare — i ljuset av Lagerqvists påståenden;
LAGERKVISTSYNDROMET
I FORMULERING OCH BEVISNING
Kolla nämligen i-cirkeln (fig.55) i Lagerqvists HP-kropp:
Lagerkvists egen perspektivkub här utritad nedan med HELA
HP-kroppens hyperbelgrenar [streckade] för att visa det exakta sammanhanget:
— Nämligen: Lagerqvist
VET tydligen INTE vad han talar om — ELEMENTÄRA KUNSKAPER fattas tydligen i
ämnet.
— Bokförfattarens påstående innefattar tydligen direkta
motsägelser:
Inskannad förminskad kopia av original i
A4-format, författarens arkiv från grundmanuskripten Aug1984 till HP-geometrin.
— En motsvarande
formulering på webben har f.ö. eftersökts som BESKRIVER ömsesidigheten i de två
möjliga rotationskomplexen RotI&II, och som ansluter till ovanstående, men har ännu inte påträffats [Okt2011]. Se
utförligt tillägg 2019 i SAMHÖRIGHETEN
MELLAN ROT I OCH ROT II.
— Webben [se exv.
Wikipedia, Perspective (graphical)] använder den föråldrade beskrivningsformen
med enpunkts, tvåpunkts och trepunktsperspektiv, [se Riktkuben]. Men ingen övergripande
MATEMATISK SYNTES som visar sammanhangen framträder i dessa beskrivningar.
Jämför HP-matematiken ¦ BILDEKVATIONEN, HORISONTALEKVATIONEN ¦ TheHOREQ ¦ HORISONTALTEOREMET ¦ TheHoriTheo.
Kort figurbeskrivning:
HP-kroppen i Lagerqvists Fig.72 här förtydligad ovan med fullständiga HP-data.
— Enligt Lagerqvist, se citatet Fig.72, skulle ”det teoretiska området för en bildframställning med hjälp av trepunktsperspektiv” vara det streckade partiet inom de tre H-cirklarna.
— Enligt Lagerqvist, citat Fig.55, skulle det partiet enligt Lagerqvists tydligt hemliga önskemål men som inte finns med i den praktiska perspektivgeometrin emellertid också begränsas av en i-cirkel (och vars SAMMANHANG Lagerkvist tydligen inte känner till); Kvadrathörn i Z-planet (Fig:a) får alltid EXAKT 90° där.
— KUBEN i bilden utgår ifrån i-cirkeln (färgad) som ett xyz-roterat objekt i denna, och erhåller SÅ genom hyperbelgrenarnas motsvarande horisontrotationer motsvarande »horisontcirklar» — vilket Lagerkvist uppenbarligen inte medger någon öppning för.
— Och följaktligen, som vi ser av helhetsperspektivkroppen ovan, där Lagerqvists figur 72 ingår:
— LinjärPerspektivBegreppets ENHETLIGHET utgår uppenbarligen INTE ifrån de tre horisonterna eller horisontcirklarna — man kan, tydligen, inte formulera saken så; LinjärPerspektivBegreppets ENHETLIGHET utgår ifrån (c i Cheops Rektangels ab=c2) en central BILDCIRKEL (i), ett bildindex (som bygger totalt på sex gränspunkter med kuben som perspektiv preferenskropp), och som här alldeles tydligt SKÄR IGENOM Lagerqvists ’stränga teoretiska område’.
— Linjärperspektiven medger — naturligtvis, Lagerqvists obevisade påstående till trots — såväl spetsiga kvadratvinklar, figurbegreppen i ab, OCH att sådana från en visst given horisontcirkel kan sträcka sig utanför en annan given horisontcirkel. Perspektivgeometrin innehåller inga visuellt åskådliga gränser.
— (Lagerqvists) PÅSTÅENDEN strider ALLTSÅ mot de egna teserna — som källan dessutom INTE
redovisar upphovet till (Lagerqvistsyndromet).
— KANSKE SPECIELLT UTPRÄGLAD SVENSK Läroboks- och Bibliotekslitteratur under 1900-talet i ämnet Perspektivlära, modern akademi.
Grundläggande kunskaper i ämnet saknas, tydligen som det får förstås i modern akademi med den referensen.
HP-kroppen — infört 11Okt2011 från doc-originalet
KALKYL_MsWORKS.doc, HP-GEOMETRIN s86, med tillägg [urspr. från grundmanus
1984].
HP-kroppen
Se även Riktkuben
PROJEKTIONSLINJEN PC till objektslinjer
PARALLELLA MED HP-kubens xyz-linjer får också dessa som gränslinjer då projektionslinjens
längd utsträcks obegränsat.
Därmed definierar HP-kubens xyz-skärning med
Z gränspunkterna xyz för 3D-perspektivet.
GRUNDERNA I
Den Linjära Perspektivgeometrin
![]()
eller TREPUNKTSPERSPEKTIVEN eller TRIANGELPERSPEKTIVEN eller HYPERBOLISKA PERSPEKTIVEN eller
HORISONTALPERSPEKTIVEN
DE LINJÄRA PERSPEKTIVENS GEOMETRI — trepunktsperspektiven, triangelperspektiven, hyperboliska perspektiven, eller som vi här ska kalla dem, HORISONTALPERSPEKTIVENS GEOMETRI (HP-Geometrin) — utgår ifrån DET FASTA PILOTSYSTEMET (xyz)i med origo i PERCEPTIONSCENTRUM (PC); En fritt vridbar RIKTKUB xyz (HP-KUBEN) insätts med sitt hörn i PC;
HP-kubens skärning med ett fast (xy-) BILDPLAN Z på avståndet i (BILDINDEX) från PC definierar gränspunkterna xyz för bilden i Z av 3D-rummets alla möjliga xyz-paralleller.
(HP-geometrins fundamentalteorem).
Bilden av HP-kuben i Z bildar alltså en triangel. Därav benämningarna triangelperspektiv eller trepunktsperspektiv.
Varje HP-triangel kan återföras på en symmetrisk eller likbent grundtriangel vars gränspunkter följer enhetshyperbelns ekvation
(halva horisonten =
√ i2+d2 = ![]() ).
Därav benämningen hyperboliska perspektiven.
).
Därav benämningen hyperboliska perspektiven.
PC [perceptionscentrum, projektionscentrum]
motsvarar biosalongens filmprojektor, Z motsvarar filmduken.
Varje objektspunkt (Pxyz) i 3D-rummet och PC
bildar en projektionslinje.
Objektspunkterna avbildas som projektionslinjens
skärning med bildplanet Z.
[Rotationerna i HPG (horisontalperspektivgeometrin) bildar
rotationskomplex II (xyz-medföljer rotationerna)].
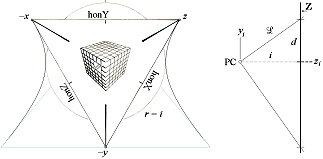
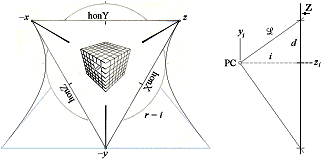
Koordinatplanen/horisontalplanen hon(XYZ) som
koordinataxlarnas xyz-normaler, ger tillsammans med dessa de sex
linjerna xyz XYZ som indelar HP-kroppens större triangel hon(XYZ) i sex
mindre rätvinkliga trianglar.
(Allmänna egenskaper).
HP-kroppens
uppritning — 3 olika sätt
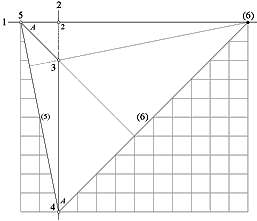
2 linjer, 4 punkter definierar HP-kroppen, se figuren närmast nedan.
1. Vi drar horisonten (Y —),
2. lodlinjen (y |),
3. markerar PC=HP-kubens
hörnpunkt,
4. markerar lodlinjens längd,
5. markerar endera
återstående gränspunkten på Y.
Koordinataxlarna xyz
är normaler till horisonterna XYZ. Därmed är HP-kroppens 6 rätvinkliga
trianglar bestämda genom ovanstående: xyz-linjerna går alla genom
mittpunkten PC och avskär därmed samma antal rutor per som horisonterna gör i
normalriktningen.
CHEOPS
REKTANGEL bd=h2 ger bildindexcirkeln
i = √ (2|3)(3|4) =
√ 2×8 = 4.
HP-kroppens
allmänna konstruktion (med linjal) på RUTAT
PAPPER.
Skalenlig 3D-Måttsättning
Skalenlig 3D-måttsättning i givet
horisontalplan (H) med horisontlängden ![]() (från symmetriska bastriangeln)
(från symmetriska bastriangeln)
görs genom att fälla ner H
plangeometriskt via CHEOPS REKTANGEL (![]() =h)
bd=h2, h=√bd.
=h)
bd=h2, h=√bd.
Se även ursprunget till CHEOPS REKTANGEL i Matematiken 1.
h fås med passare genom att
först dela b+d=2R i hälften (dra lika stora cirklar från 2R-sträckans
ändpunkter, cirklarnas skärning på ömse sidor om 2R ger en normal till 2R som
delar denna precis mitt itu), och sedan dra cirkeln R från mittpunkten.
Skärningen mellan R och H-normalen genom PC definierar h, analogt den i
R-cirkeln inskrivna rektangeln (från Cheops rektangelteorem).
Figurerna i den nedfällda plangeometriska H-delen överförs sedan via deras referenspunkter (P) till en H-parallell som flyttas upp (se figuren ovan) så att den skär genom PC. Därmed kan motsvarande HP-linjer dras från P till respektive gränspunkter på H. Figuren ovan exemplifierar tillvägagångssättet.
FLERA SÄTT FINNS att teckna HP-kroppen.
Exemplet nedan från i-cirkeln.
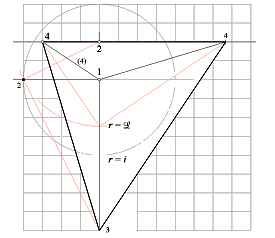
3 punkter med i-cirkeln definierar HP-kroppen, se figuren närmast nedan.
1. Vi drar i-cirkeln
från punkt 1,
2. markerar horisonten (H)
genom punkt 2,
Därmed är nästan hela
HP-kroppen given:
2 medför via givet i att också ![]() blir givet (2|2),
blir givet (2|2),
3. samt därmed också
lodlinjens längd via normalen 2|3
4. HP-kroppen fullständigas
genom att bestämma gränspunkten på H för endera av de bägge återstående
koordinataxlarna.
Koordinataxlarna xyz
är normaler till horisonterna XYZ. Därmed är HP-kroppens 6 rätvinkliga
trianglar bestämda genom ovanstående: xyz-linjerna går alla genom
mittpunkten PC och avskär därmed samma antal rutor per som horisonterna gör i
normalriktningen.
HP-kroppens
allmänna konstruktion (med linjal OCH
passare) på RUTAT PAPPER.
Ytterligare ett sätt:
4 punkter med en H-cirkel definierar HP-kroppen, se figuren närmast nedan.
1. Vi drar horisonten (H);
2. Vi drar H-cirkeln med
radien R från punkt 0 (ej utsatt),
Därmed ges gränspunkterna 2
och 4.
3. Vi anger lodlinjen, samt
PC på denna (punkt 5), vilket också ger punkten markerad 3.
Två av HP-kroppens
rätvinkliga trianglar delar på en gemensam rektangeldiagonal via 2R. Normalerna
i punkterna ab blir därmed givna via PC, och därmed även den sista
gränspunkten (8).
Med detta sätt tvingas PC,
punkt 5, ligga INOM R-cirkeln.
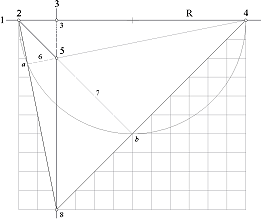
HP-kroppens
allmänna konstruktion (med linjal OCH
passare) på RUTAT PAPPER.
Från passare och linjal till plotters och
dagens datorer
Ända fram till »brytningstiden» under
1980-talet (då olika datorplotters började dyka upp) fanns bara i stort sett
Passare och Linjal för att utföra olika ritningar för gemene man. Man hade
ritbräden, vinkelhakar, textmallar, gnuggisar och i allmänhet Rotrings
tuschpennor (och Caran D’aches 2mM blyertsstiftpennor) som kunde köpas hos alla
välsorterade bokhandlare. Idag (2011) finns inte ett spår kvar av den epoken.
Det är som att en hel värld har »transformerats» till en helt annan.
— I dagens läge (2011) kan i stort sett alla
möjliga 3D-komplex utföras direkt på datorer (och skrivas ut med högupplösande
skrivare) — tyvärr ännu inte med några direkt enkla program som kan användas
utan mer eller mindre ingående 3D-erfarenheter.
3D-GEOMETRIN
2008 | PILOTxyz.wps 2001II16 | urspr. frn. Index7c.wps 1998VI26 | Rotationssatsen — ROTATIONSSATSEN
ROTATIONSSATSEN
![]()
Med hjälp av en gyromodell kan man relativt enkelt konstatera den omvända samhörigheten mellan de bägge rotationskomplexen I och II.
En motsvarande beskrivning eller omnämnande har eftersökts på webben (@INTERNET November 2008) men inte hittats.
Modellen nedan är en konstruktion av denne författare från 3D-programmet Simply 3D som en del datortidningar gav ut som gratisprogram under Windows 95-eran. Tyvärr fungerar inte Simply 3D på senare datorsystem (32-bitar och uppåt) — vilket är synd med tanke på dess relativa enkelhet och därmed utmärkta verktyg för nybörjaren. Sådana program varken finns eller görs i dag, samtliga gratis 3D-program är (numera) så komplicerade att nybörjaren snarare avskräcks än känner sig inbjuden.
Vi studerar hur omvända rotationerna i det fasta
bildsystemet är exakt samma som rotationer i gyrosystemet.
Väl det en gång fattat tillsammans med vinkelsummateoremet,
finns inget rotationsproblem som inte kan lösas.
Sambandet mellan RotI och RotII — Följande beskrivning använder genomgående Pilotsystemet
1998VI26
I koordinatgyrot nedan till vänster Gyro1 ser vi att första
rotationen alltid är gemensam för bägge rotationskomplexen I och II.
— Tänker vi oss nu att vilja rotera yW (rotation kring fasta
vertikalaxeln) via RotI från detta läge ser vi direkt att detta är detsamma som
att vrida gyro-x-axeln helt plant utmed den fixa Y-ringen i det fasta
RotI-systemet. Med negativt 15ºyW i RotI får vi resultatet i Gyro2.
Om vi nu i detta slutläge Gyro2 vrider upp kuben via det andra
rotationskomplexet, RotII, alltså via kroppssystemets x-axel, så att
gyro-Y-planet återigen sammanfaller med den fixa Y-ringen, Gyro3, då är det klart att
|
|
Gyro 1 |
Gyro 2 |
Gyro 3 |
Gyro 4 |
|
|
|
|
|
|
|
RotI |
30ºxW |
30ºxW,
–15ºyW |
–15ºyW |
Gyrot nollställt |
|
RotII |
30ºxW |
–15ºxW,
30ºyW |
–15ºyW |

1. xW blir nollställt för RotII — som alltså innebär att motsvarande
baklänges rotation från Gyro2 i RotII är –30ºxW
2. den sista vridningen för att nollställa gyrot blir de återstående 15
graderna från RotI, alltså samma som för RotI (gyro-x-axeln, i Y-ringens
gömda plan, har hela tiden legat kvar på exakt samma ställe som den lämnades
via den andra rotationen –15ºyW i RotI).
— Om vi nu genomför dessa för RotII diskuterade baklängesrotationer
— –30ºxW, 15ºyW — men baklänges — –15ºyW, 30ºxW — så att vi börjar med yW och tar xW
sist, kommer vi alltså tillbaka till läget i Gyro2. Slutsatsen blir alltså :
RotI 30ºxW, –15ºyW
ger exakt samma resultat som
RotII –15ºyW, 30ºxW
Exakt samma rotationsvärden — samma
rotationsbeteckning — men i omvänd ordning.
Med andra ord ; RotI och RotII ger samma resultat om samma vinklar och
värden från det ena rotationskomplexet tas i omvänd ordning mot det andra. Vi
kan pröva med vilka som helst andra två rotationer och vi finner alltid samma
överensstämmelse. Men:
— Gäller detta även med en tredje rotation inkluderad?
— Ja. Det gör det.
Om vi tittar på föregående gyroläge 2, och tänker oss att i detta läge påföra en zW-rotation via RotII (vi
sätter den här till 45ºzW), då inser vi, via tillbakarotationerna för att få
nollställning, att slutläget blir detsamma som att se gyrot från dess Z-plan i gyrobild 2 (den svagare delen i mittbilden nedan
motsvarar 45ºzW) ;
|
|
|
Gyro 2 |
gyrobild 2 |
gyrobild 3 |
|
|
|
|
|
|
|
RotI |
|
30ºxW,
–15ºyW |
|
45ºzW, 30ºxW, –15ºyW |
|
RotII |
|
–15ºxW,
30ºyW |
|
–15ºyW, 30ºxW, 45ºzW |

SOM VI SER är detta helt (trivialt) ekvivalent med att vi i RotI börjar
med den slutliga zW från RotII. Detta är fullständigt klart (tänk in den sista
RotII-rotationen som mittbilden ovan antyder, denna ingår därmed sedan
‘naturligt’ med utgångspunkt från RotI, resultatet kan vi studera i
högerbilden), och om vi gör på samma sätt med andra rotationsordningar (= andra
namn på axlarna) finner vi naturligtvis exakt samma princip och ordning.
Sålunda :
rotationssatsen: INL.
RotI och RotII ger exakt samma resultat om
samma vinklar och värden från det ena rotationskomplexet tas i omvänd ordning
mot det andra.
— Same end result from reversed order
between I and II.
Ovanstående i syntes

Om vi först studerar sekvensen för RotI — rotation av det inre gyroobjektet i det yttre fasta 3-ringade bildsystemet med dess fasta xyz-axlar
— enligt 30°xW och sedan –15°yW
— vilket ger det utroterade X-planets cirkel precis skärande 15°-strecket på den fasta yW-ringens skala
— ser vi tämligen enkelt att precis samma slutläge fås i RotII
— systemaxlarna följer med
— om vi börjar med –15°yW och sedan utför 30°xW.
Med detta fattat kan vi nu framgångsrikt studera tre rotationer och se att precis samma principiella ordning gäller:
I ovanstående sista bild (höger) lägger vi på en initierande 45°-rotation, översta raden med RotI; vi ser (om vi tänker efter en stund) att detta kan göras ENKELT genom att rotera gyrokuben ovan i sista bilden 45°zW vilket ger oss slutbilden nedan längst till höger,
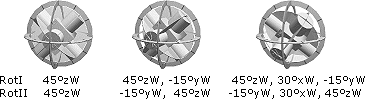
Genomför vi sedan slutligen en återrotation genom RotI — vi börjar med minus 45°zW, sedan minus 30°xW och sist plus 15°yW — kan vi för varje sådan återrotation följa i detalj och se att vi också verkligen återställer gyrot i nolläge. Och alltså gäller rotationssatsen som ovan.
*
Full redovisning Feb2019
Ett motsvarande
algebraiskt bevis finns också — se utförligt från EQUIVALENCE OF
ROTI AND ROTII.
— Men det är
(betydligt) mera krävande då det förutsätter bekantskap med den speciella
matematiken i RotII — som kräver (åtskilligt) utrymme — se Rot II Origin.
Det är också underligt att inget alls tycks
finnas på webben (ännu November 2008 — och fortfarande samma Feb2019) som ens ger
en elementär orientering i ämnet — frånsett högskolematematikens matriser och
determinanter förstås, eller vad som påstås sammanhänga med dessa: redovisning
saknas.
”Matriser och determinanter” har f.ö. ingen
representation i Universums Historia:
— Enda
anledningen: finns inget som helst behov. Helt rent. Totalstädat. Komplett
Glänsande.
I modern akademi verkar det inte finnas
något utvecklat rationellt beskrivande vokabulär för de två skilda
rotationskomplexen. MEN: Man känner — eller rättare sagt FÖREFALLER känna —
till dem:
Se Konventionell beskrivning av de två rotationskomplexen inom
3D-geometrin — här i ny erinrad upplaga, se citat
från WolframMATH2019 med kommentarer och jämförelser.
— Man tycks —
fortfarande — inte kunna beskriva saken med andra ord än genom
högskolematematikens matrisbegrepp, eller det som förefaller koppla DIT genom
nämnda: redovisning saknas — vilket garanterat portar de allra flesta människor
från ämnet.
Märkligt är det:
— Man VET inte.
Därför att OM man visste, saken redan sedan länge hade sett dagsljuset[‡Origin].
3D-GEOMETRIN
2008 ¦ 2019
APPENDIX
The ORIGIN OF ROTII ¦ EQUIVALENCE OF ROTI AND ROTII
————————————————————————————
FJÄDERANALOGIN — Spring
Analogy
ALLMÄNNA SAMBAND FÖR ATOMKÄRNANS MEKANISKA FORMHÅLLFASTHET ENLIGT RELATERAD FYSIK — K-cellens Detonation
I
htm-kopia 9Jun2012 från originaldokumentet (Maj2004) i MsWORKS 4.0
Fjäderanalogin.wps
COMPARING
EXAMPLES — by Examples Ex0 | Ex1 |
Ex2 | Ex3 | Ex4
Jämförande exedmpel som
avslöjar den etablerade lärobokslitteraturen obefintliga ämneskunskaper — Se
särskilt i LagerqvistSyndromet
INTRODUCTION PRECISE TECHNICAL DRAWING IN The HORIZONTAL PERSPECTIVE HP-BODY
COMPARING THE LEVEL OF KNOWLEDGE IN MODERN ACADEMY
Quoting Established Sources ¦ EXAMPLE 0 ¦ EXAMPLE 1
¦ EXAMPLE
2 ¦ EXAMPLE 3 ¦ EXAMPLE 4 ¦
Ex0CheopsRECTANGLEby2NeedlesAndRightAngle:
PRACTISING
CHEOPS RECTANGLE
WITH ONLY TWO NEEDLES AND ONE PLEXIGLASS RIGHT ANGLE TO GET THE HP-BODY PERSPECTIVE XYZ-HORIZON INDICES:
CALLING PLANET InternetSearch EARTH HUMAN if
there are any left POPULATIONS JAN2019:
— How many single individual persons on Planet Earth
Jan2019 KNOW about this one:
ONE precise Plexiglass right angle, two steel pins (Ø0.6mM), square (2/10’’~5mM) printed paper for ease of test or millimeter-printed paper for more precise quantitative inspection, needled by distance a+b on a white piece of 2mM passe-partout carton:
— By carefully pushing the
angle against the NeedleShafts, the angle-tip DIRECTLY NOT ONLY solves c=√ab.
But ALSO solves the problem of finding a given perspective horizon’s INDEX
length (![]() )
— for further exact and precise TECHNICAL perspective drawing[‡].
)
— for further exact and precise TECHNICAL perspective drawing[‡].
Given a three corner triangel (below right) with a middle intersecting point for the three horizontal normals:
— Each horizons perspective INDEX
length (![]() )
is found projectively by folding its horizontal plane (X¦Y¦Z) down on
the horizon’s normal. The practical way for that fold is as shown below left
with needles and a 90°angle.
)
is found projectively by folding its horizontal plane (X¦Y¦Z) down on
the horizon’s normal. The practical way for that fold is as shown below left
with needles and a 90°angle.
— Then further precise angles for precise vanishing perspective points LimitPoints can be marked on the given a+b-horizon. In all: Just ordinary plane simple geometrical basics.
CHEOPS
RECTANGLE: Ex0CR
— IN
PRECISION LINEAR PERSPECTIVE DRAWING:
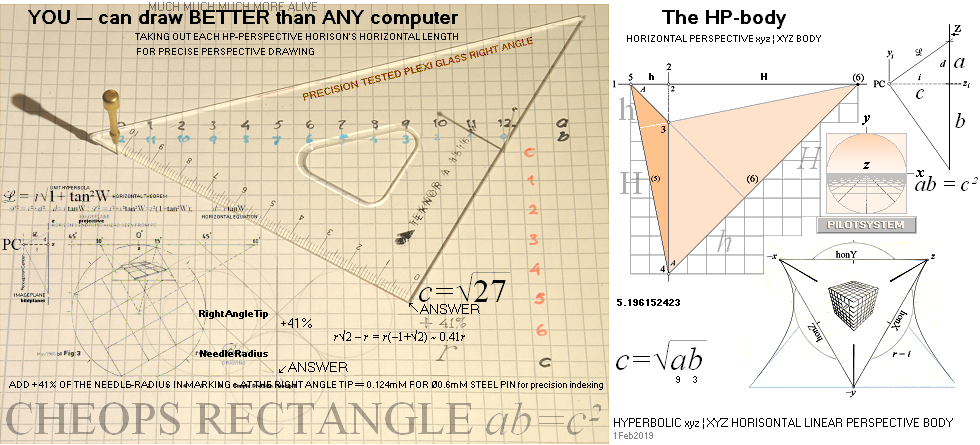
There
are also a number of other ways to ONSET the actual HP-bofy three corner
triangle. See from Onsetting the HP-BODY. See also THE
HORIZONTAL EQUATION. See also CHEOPS RECTANGLE.
— Two?
— Five?
— Three thousand? Five hundred thousand?
LOOKING @INTERNET 1Feb2019
we WOULD wish ”the web” to be »full of it»: Ideas,
examples, methods: The CHEOPS RECTANGLE Method Yess
none of the above simple principle linear perspective drawing details seem to have a front web representation:
— not seen. Searched for. Not (yet) found.
Pen. Paper. Rulers. Needles. Carton. Plexiglass angles. Compasses: Traditional Classic Drawing WITH a deeper ELEMENTARY insight into the explaining mathematics — logics — of it.
No computer. Just YOU and Nature — promoting[‡] ”the full and free development of personality”: The Individual’s Own Private Unique Way: NOBODY makes it like YOU do. Guaranteed.
— Where is That ”deeper” 1Feb2019 on Earth? I don’t see any.
Compare Quotes from established quarters on the subject (Wolfram 2019 ¦ Perspective Education 1966).
Search word, exact ”CHEOPS RECTANGLE”. Two hits
1Feb2019:
1. NASA’s satellite project — with merchandise products,
not really our subject.
2. This Portal, UniverseHistory — the
connection as such bd=h2.
— No more. No Perspective stuff. Wikipedia on
Perspective (graphics) is far from even a mentioning.
On the other hand, fair play: the Term ”CHEOPS
RECTANGLE”
might not be familiar, while the expression might ...
What’sUp?
IF no one cares about looking for the treasures, they continue being perfectly aligned with the ticking seconds in darkness. They exist. But not (yet) in daylight.
Comparing related mathematics with modern
established sources Jan2019:
The only mentioning we find on
the subject in modern quarters:
TRANSPOSITION MATRICES[‡] IN MODERN ACADEMY — RotI&RotII in modern quarters
Wolfram2019: Establishment
WOLFRAM MATH WORLD mentions (Oct2011 ¦ Jan2019: Rotation Matrix)
” When discussing a rotation, there are two possible conventions: rotation of the axes, and rotation of the object relative to fixed axes.”,
” Wolfram websites
use cookies to improve your experience with our services. By continuing to use
this website, you are consenting to this use as described in our Privacy
Policy.”,
WFoct2011 ¦ Wolfram Rotation Matrix 31Jan2019.
COOKIES VIOLATES HUMAN
RIGHTS:
Freedom
to hold opinions WITHOUT INTERFERENCE:
Everyone
has the right to freedom of opinion and expression; this right includes freedom to hold opinions without interference and to seek, receive and impart information and ideas through any media and regardless of frontiers.
”By
LOOKING AT ME you agree/consent to ...” IS Classic Fascism: dictatorship. IS.
Wolfram
Math, please, and associates:
—
I make my own choices, regardless of what and how other people make theirs.
—
My experience is my own personal property, as your is yours. And no one is
capable of ”improving” inside of that property EXCEPT you for you and me for
me. Nobody.
NOBODY.
The
CookieSyndrom IS a Dictate, a Prompt, a Fascistic claim. Provable in every
detail. Leave it. Drop it. Stop insulting Humanity.
General Cultural Company Enterprising:
”..
to the end that
every individual and every organ of
society, keeping this
Declaration constantly
in mind, shall strive by teaching and education to promote respect for these rights and freedoms .. ”.
—
CONSENT again, Wolfram + Associates: — »We give a SHIT about THAT». Not a word.
— That SEEMS perfectly correctly stated with respect to the provability of respectively RotII and RotI.
— HOWEVER. A little more than on line + a right angle is needed to CONFIRM the acquaintance.
The Wolfram source @Internet gives nothing else than information about the algebraic/matrix sets in mentioning them from established sources (Goldstein 1980, Arfken 1985). The only LEAD the reader receives is this — very, exceptional — deep explaining properties of the subject:
Modern Academic
HIGHLY EDUCATIVE CONTRIBUTION TO THE ENLIGHTENMENT OF PERSPECTIVES:
Wolfram Math
World Improves Our Mathematical Experience with Practical Examples:
3D-Perspective Rotations — with Simple To
Understand Arrows, Deepening Our GotItExperience.
— Wolfram, please: How come this outrageous
ABSTRACTION? Please, do show.
— »WE don’t
know». Please do correct if wrong.
— The best part with modern academic algebra
on visual perspectives: we don’t have to SHOW any.
cont. →
MACAndIntelligence: W2019
Related Description — versus Universes History, its Basic Math and TNED-physics: trying to throw some light onThe Subject
— Are you consenting human rights or not?
WOLFRAM
MATH AND ASSOCIATED, TRY THIS ONE: Attitude — opinion, claim, statement,
thought, apprehension, idea, notion, interpretation: mind, sense — outside the
recognition of human dignity, human rights, IS PRACTISING OPPRESSION: Fascism,
Nazism, Dictatorship, Devilship, Satanism — Pick one: A01 UDHR10Dec1948 — ”WHEREAS recognition of the
inherent dignity and of the equal
and inalienable rights of all members of the human family is the
foundation of freedom, justice and peace in the world,”;
EVERYTHING else MEANS NOT freedom, NOT justice,
NOT peace: PRACTISING OPPRESSION: Fascism, Nazism, Dictatorship, Devilship,
Satanism — Pick one. HENCE: CRIMINALITY — any kind of offence, insult or
attack on decency — is unequivocally FOUGHT by (A08) ”teaching and education to
promote respect” for HUMAN RIGHTS; WHEREAS — WOLFRAM MATH WITH ASSOCIATED AS
HERE obviously so PROVEN IN DETAIL — Humans, Communities, and Cultures who DO
respect human rights NEVER — ever — develop any kind, sort or type or nature of
OFFENSE: no criminality, no attacks, no intrusions: no interference with privacy [A12]. Not in our cultural epoch, not in any other either. It is a
LAW BY NATURE. Please do make corrections if wrong: All other activity and
claim, aiming to fight criminality and general offence, HENCE IS practising
oppression: devilry — by DRIFT, never by PLAN: nobody chooses stupidity over
sanity inspired from a rational point of view. Only a fucked up ATTITUDE do so.
I don’t think it is so. I know it is so.
WOLFRAM AND OTHER ESTABLISHED INTERNET PORTALS SUCH AS WIKIPEDIA and Associates radiate this general impression:
— Modern Academic mathematics and physics are GENUINE, SERIOUS and (deeply) RATIONAL — intelligibly — founded branches in a general natural scientific TREE of »universal knowledge». It would be nice if that was the case — then this presentation never had to face the light of day.
In TESTING this assumed Modern Academic LOGICAL reliability — at first in the PRACTICALLY EXPLICABLE area of magnetism and induction — details appeared (here in 1994) exposing the modern idea of magnetism and induction to be SURFACE MINDED: it doesn’t tell the whole story. It leaves (huge) gaps, unanswered questions, formulates »dumass math inventions» to compensate. WITH a following general disability to rationally EXPLAIN the connections: THE differential equation for the EXPANSION INTEGRAL in Magnetism is not only UNKNOWN in Modern Quarters. But also makes a general CRASH IF the established concepts of VECTOR ALGEBRA are applied to it. Really. Let’s see why.
— In modern quarters it is held in general that induction and magnetism follow Maxwell’s equations, and have a common physical origin: modern academic vector calculus. But THE SOLUTION to the variant, the actual magnetic integral in modern quarters, IS known: The Biot-Savart Law. So: In comparing the actual PRACTICAL RESULTS FROM TESTING THE PHYSICS contra corresponding EXPRESSIONS in different established textbooks — especially on the level of INDUCTION — the peculiar did arise between Modern Academy MAC and Related Mathematics and Physics TNED, see Three Examples in Treatise. What? What appeared? WHILE TNED APPARENTLY explains the details by atomic precision — especially
WHY MAC ERRONEOUSLY IDENTIFIES µ0 WITH
MAGNETISM
cont. →
TNED EXPLAINS PHYSICS IN DEEP: In induktance (µ0s) the foundational space-compactness µ0 is always present. In magnetism
![]() :
:
IT IS A SIMPLIFICATION FROM THE BASIC DEEP
NEVER DEVELOPED IN MAC
it never appears:
— In MAC, says TNED, this IS the only known reason why the phenomenon of induction is associated, identified, with magnetism — despite the simple ”Maxwell’s rule” showing it does NOT. Proof: The Parallel Experiments 1994. Has been searched for in established literature, not found:
Proof of induction as
completely liberated from magnetism
MAGNETISM AND INDUCTION NEVER — ever — INTERACT
— but modern academic textbooks are full of such claims
— The »MagneticDifferential»[‡] has no modern academic
representation: Modern academy INSTEAD departs FROM INDUCTION — »covering over»
The »MagneticDifferential» BY modern academic vector calculus: The bare raw
rational logical related mathematical and physical proof which explains the
whole complex in absolute deep detail, is driven over by modern academy vector
calculus AND ITS DEMANDING CONSEQUENCE: the fatal idea that induction and
magnetism interact. They don’t, says TNED: Induction and
Magnetism NEVER interact — as x and y never interact, as Light and Kinetics
never interact — only cooperates
in a way neither very well described in modern quarters:
— c and v never interacts:
— light has no kinetic connection: light and kinetics never
interact: Light’s
Liberty Clause in Related Physics, with further:
— Physics is governed by The Planck Equivalents — NOT Einstein’s
Theory of Relativity — the vic-error: LIGHT
AND KINETICS DOES NOT INTERACT. Practically the same mathematical expressions:
fundamentally different physical foundations. Page up. Page down. Experiment
in. Experiment out. Not one found exception. A NEW — »very old» — model of the
universe appears.
— Magnetism and Induction
HAVE DIFFERENT DIMENSIONS — but Performs A Dolls House Theater if insisted to
Match — holding mankind in darkness, ignorance and delusion, proclaiming IT to
be The Master Intelligence. 1800+ answers.
— And so, the bottom line says it: Magnetism’s FUNDAMENTAL physics CANNOT be applied on modern academy vector product. BECAUSE in doing so 1. the modern academic vector calculus responds by CRASHING on itself, and 2. (so) proves that induction and magnetism NEVER interacts — as also experimentally notified[‡], however searched for in established literature but not found. And there are more examples outside magnetism and induction:
— See f.ex. (for example) Central motion — the MIT-example.
In EXPLAINING Nature, modern academic teaching system has excluded itself by inventing ideas instead of deducing them from Nature, says TNED. To underline the sublime differences — with the shocking essentials by school examples especially in concern of Light and Gravitation PHYSIC’S SEVEN PRINCIPLES — the following compilation serves:
NATURE in physics, comparison MAC/TNED:
|
TNED: Dedicated
Proof to all Nature Lovers: ———————————————————— 1. only natural constants:
2. .. in the beginning ...
3. .. Earth .. fusion limit mass ...
THE
BOTTOM LINE: CHEOPS PYRAMID
ATTESTS TNED — from
Cheops Rectangle: 4. .. possible ancient remnants ..
5. .. Sun’s
Photometric Effect — a direct
TNED-hit ... |
PRACTICAL and highly provable in any
deep EXAMPLES IN related as in TNED MATHEMATICS AND PHYSICS SHORT SYNTHESIS dedicated
to MAC
3Feb2019 in comparison with TNED related physics and
mathematics — practical examples to enlighten »the population of the dark age» — inside modern academic quarters: • MAC/EINSTEIN on »light’s gravitational dependency» term not found in MAC: c/c0
= (1 – w2/c2)
— invented logic: — c and v do interact, see vic-error — disproved by M&M-experiment from 1881, never recognized (however noted) in MAC • TNED/CHEOPS RECTANGLE ¦ LIGHT’S GRAVITATIONAL DEPENDECY, c/c0
= (1 – w2/cc0)
— deduced from basic geometry: c0 is conserved
independently of gravitation, — c and v never interacts —
in full concord with induction and magnetism, as above noted • — Harmonic Triangles explaining The Complex Algebra:
r=x+íy. • — Light’s Gravitational Dependency —
preserving-guaranteeing c0 independently. • — Square Roots. •
— Cheops Pyramid from Flinders Petrie’s measurements 1883: The rJ-Circle Construct. • — Foundational Perspective Mathematics[‡]. ... Attempting a FURTHER CONTEXTUAL CLARIFICATION: —————————————————————————— Environmental SAFE — Huge —
Energy For Mankind; — no WindPoles, no Nuclear
Plants, no Deforestation, no Petroleum, no
Fuckups: TNED ATA/CAT DEDUCTIONS: The
complete disintegration of the atomic nucleus — regulated by simple math, but
tough to realize technologically — yet Feb2019: But Modern Academy has locked
itself outside its details Because of INVENTING, not deducing, physics from
1800+: TNED explains the details: ATA
AtomNucleus’ Transmissive Autonomy — as in ARC ¦ [‡] with modest current.: CAT
Capacitive Transmission — as in LIGHTNING with a sufficiently large
current. —
The TNED DEDUCED FROM PLANCK CONSTANT[‡]
Atomic Nucleus includes, incorporates — is based upon, physically
exclusively — a self catching CURRENT TRAP. It is perfectly mathematically
explainable and expressible, specifically apparent in an ARC and LIGHTNING.
The MATH-part — as also Nature Shows IT — points to a complete adequate E=mc2
disintegration of the nucleus without any kind of rest products. Nature
demonstrates IT in natural Earth cloud-ground lightning provided sufficient
current strength — see also The
Zambia Positron TGF certifying
the principle TNED-theoretical part of it. —
BUT MODERN ACADEMY PEOPLE ARE STANDING COMPLETELY OUTSIDE THE SUBJECT DUE TO
THE MODERN ACADEMY INVENTED IDEAS OF NUCLEAR PHYSICS IN GENERAL: it is a
hopeless primitive[‡]: —
TNED + Experimental Physics = TRUE. So to speak. And we need only one — 1 —
simple itty bitty tiny practical example that exposes flaws or any the
smallest error in TNED, in order to advise IT to the TrashCan. Please do
show. Very high IQ. SUGGESTED PROJECT NAME: save humanity from
killing Earth BioSurface. |
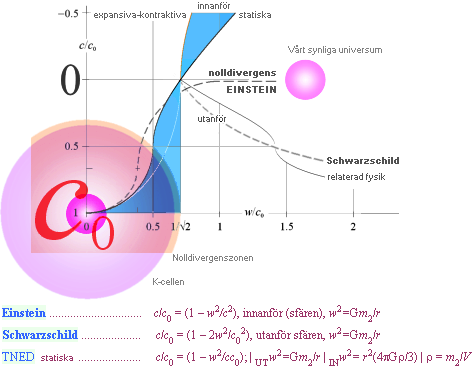


→ cont.
a corresponding MAC-presentation SO has banned itself out of the NATURAL SCIENTIFIC p(a)lace from square one;
— To ”understand” MAC-induction and magnetism, the student MUST adopt an intellectual method »INVENTED BY OUR FOREFATHERS»:
— No RATIONAL depth exists in MAC-induction. It is Surface minded from begin to end. CONCLUSION, says TNED:
Modern academy and its love to its own »master
intelligence ideas» evolved 1800+
”to overcome ones human limitation and become master of the universe”, on the Fields Price medallion:
Transire suum pectus mundoque potiri. ”The most glamorous honour a mathematician can receive”.
DID DEVELOPE only a NOMENCLATURE on the level of ”A
Doll’s House Theater”, so to speak. Nature — the student’s mind — was
locked out.
— PRACTICALLY THE SAME END EXPRESSIONS HOLD in TNED and MAC, if at all[‡]. But with vast essential differences in explaining the nature behind; There is NO — guaranteed — conversion between the two. Only one of them can EXPLAIN the other — as »A Primitive».
So, WOLFRAM MATH with other associates in this subject of 3D-Rotations and Perspectives: GENUINENESS OF MATHEMATICS — matrices and Modern Academic Vector Algebra specifically — demands a little more than two figures with three straight lines to EXPLAIN, or claim, the Nature behind the body of perception and how it works in Linear Mode:
— Modern academy vector calculus
is NOT a valid NATURAL SCIENTIFICAL method of explaining anything except a provable primitive logical
inventive method leaving out the deep — relatable, understandable — part of
natural intelligence, as exemplified above. Not necessarily wrong. But
indeed primitive.
→ cont.
EXCEPT FOR one line and a right angle TWO FIGURES that seem to have nothing in common with Related Perspective Mathematics, WOLFRAM EXPOSES NO FURTHER ILLUSTRATIVE WORK.
— Compare RELATED MATHEMATICS: 100% Pedal — Real Horse Power stuff:
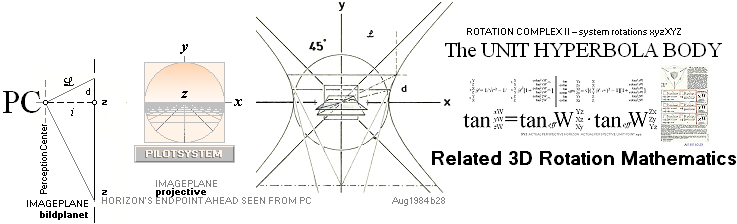
The Wolfram Rotation Matrix
— although claiming rhetorically familiarity with the end result[‡] from the equality between Rotation
Complex I and Rotation Complex II — seems to have nothing, no practical
connection at all, with the actual practical subject.
— The Wolfram source does not CLARIFY, or cannot do so, its
MEANING of the symbols with respect to BASIC VISUAL ELEMENTARY FOUNDATIONS:
— Modern Academy High School References Leave Pedestrians
out. Why not handcuff them directly, too?
THE WOLFRAM PRESENTATION OF THE CLAIMED TWO POSSIBLE ROTATION SYSTEMS
See Rotation Complex I and Rotation Complex II
USE MATRIX AND MODERN ACADEMIC VECTOR[‡] NOMENCLATURE.
— There is no PRACTICAL — by vision, sight — account. Only a deep and vast abstract account. Very.
What IS that?
— Modern academy has during its Inventive Period in the 1800:s COME UPON A METHOD of ”Cut-To-The-Chase”-algebra, skipping all the practical stuff in between, getting directly to The Profit Station: The less normal pedestrians understand of the content, the more Profit will come BECAUSE it lies in the Nature of Man and Woman to ASK for Answers to Everything — Unknown. So the More ”Cut-To-The-Chase”-algebra, leaving everything outside, the more MustBuy. Then Profit is secured. ”You Pay Monthly to SEE”.
— They don’t Know. Because if, it would be shown.
Can’t explain. Can’t describe. No details.
RELATED MATHEMATICS EXPLAINS by practical examples and comparing cross references:
— As is evident from the examples in deep (magnetismen, induktionen, centralrörelsen), describing NATURE in deep with the help of modern academic mathematics does NOT work very well. In fact, as so proven:
— It crashes. Deeply. IT isn’t for Understanding. IT is — or rather appears to be only — for Profiting.
»Magnetism&Induction under same roof»: Doll House Theater: Atomic Bombs; Technology for Cutting Forests down: The Forests who laid the foundation of the human and land animal evolution: »cultural suicide». A Fundamental Environmental Crash 1800+. ”Cut-To-The-Chase”-algebra.
Nothing wrong with the algebra. Absolutely not. Mathematics is never wrong. But the ATTITUDE behind MIGHT be, depending on ”cultural traffic conditions”.
Please make corrections if wrong: Knowledge explains, not Dictates. So, Modern Academy:
— IT cannot explain Nature — related thinking based om simple elementary natural properties[‡] that every person can understand in every atomic detail[‡] — IN DEEP: deeper, deepest.
Please do give only one rejecting example — one: 1 — and this author will convert immediately.
— Surface minded ideas of math: Destructive natural intelligence. Destructive natural behaviour. Partnership.
— By DRIFT. Of course. NOT by Plan. Buddha’s simple teaching on The Two Principles: 1. The principle of ignorance — DRIFT — and 2. the principle of INSIGHT or KNOWLEDGE or HARMONY (Nirvana).
COMPARE A POSSIBLE EXPLANATION[‡]:
— »During the 1800:s, Modern Academy had direct revelations from the lord, automatically introducing Nirvana in modern mathematics»:
”to overcome ones human limitation and become master of the universe”, on the Fields Price medallion:
Transire suum pectus mundoque potiri. ”The most glamorous honour a mathematician can receive”.
The whole established subject obviously rests on »pure high school mathematics»: matrices and the general modern academic »High IQ» vector algebra: As abstract as can be. Pedestrians are left outside: ”Above our paygrade”.
In Universes History:
No trace exist in Universes History of such Modern Academic High School mathematics: no statistics — Compare RELATED Deduction of Planck Radiation Law[‡]: no statistics. Not an atom of it.
— In any RELATED sense, we are allowed to use only relatable concepts, each one by detail leading back to the simple elementary basics — leaving no single individual behind:
— IT relates, or not at all. No modern logic academic inventions. No jumps. No dark corners. If we don’t know, we don’t know. If we do, we do. We walk the paths we know, and stay away from the rest — until better equipped with a method of conquering the difficulties. Always WITH nature. NEVER against.
As far as known, that is the closest we get in any contribution from the »Nature Earth Destructive Occupying» modern academic teaching system 1800+: transposed matrices. It is, obviously, a guaranteed exclusion of Human Mankind main populations from any relatable practical insight.
OBVIOUSLY: Some persons in modern academy has taken some time to »press the subject through» modern academic high school mathematics (combinatorics). It however seems that no ELEMENTARY — basic mathematics — description exists at all in modern quarters on the subject RotI&RotII — despite the subject’s simplicity, as here described.
Has been searched for, not yet found.
Wikipedia on Perspective (Graphical,
30Jan2019) is far from
even mentioning the term HYPERBOLA in any context connecting the basic elementary
visual linear perspectives. The word ”hyper-” is not even mentioned in the
article. Wikipedia mentions one, two and three ”point perspective” with some
poorly relatable computer graphics — and four .. six .. unillustrated. No
clarifying practical — pen and paper — descriptions. Nothing for a potential
artist to consult: no deep info. And: Don’t even think about mentioning The CHORD.
TRADITIONAL LIBRARY LITERATURE is even worse:
A Practical Example of PRECISE MEASUREMENT COMPOSITION in linear perspective from 1979, this author’s pen and hand:
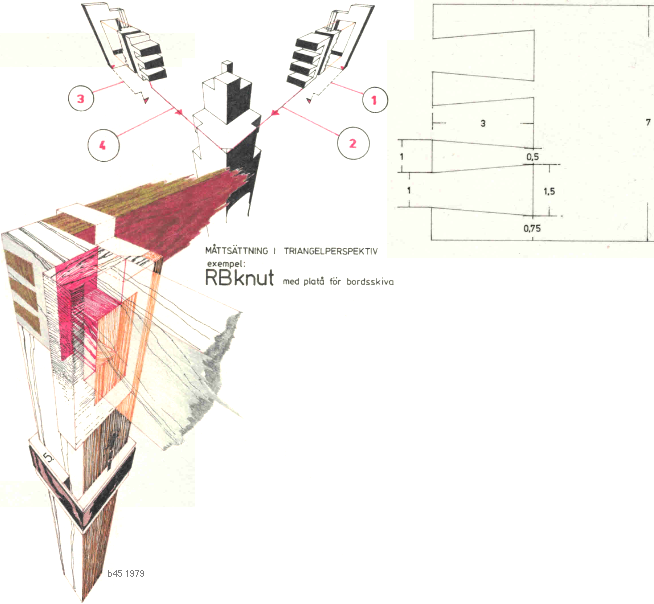
compared to claims and
statements we find in established educational library literature on the
subject:
”MÅTTSÄTTNING
AV PERSPEKTIV
För
måttsättning passar ingen annan metod än den rätvinkligt parallella.”,
RITTEKNIK — Regler och råd för teknisk ritning med projektionslära,
LÄROBOK I TEKNOLOGI FÖR GYMNASIET OCH TEKNISKA SKOLOR,
Lars Walldén, SÖ-förlager 1966, s72;
”MEASUREMENT
COMPOSITION IN PERSPECTIVE
For
measurement composition no other method is suitable than the right-angular
parallel.”.
— So modern academic teaching system keep saying.
— Why not handcuff the students directly — too?
More examples:
Ex2PMCLP2017: Ex1
CHEOPS
RECTANGLE
Section Nov2017
—
Details inside Cheops Pyramid: Instructive
clarification —
THE GALLERY GRANITE PLUGS
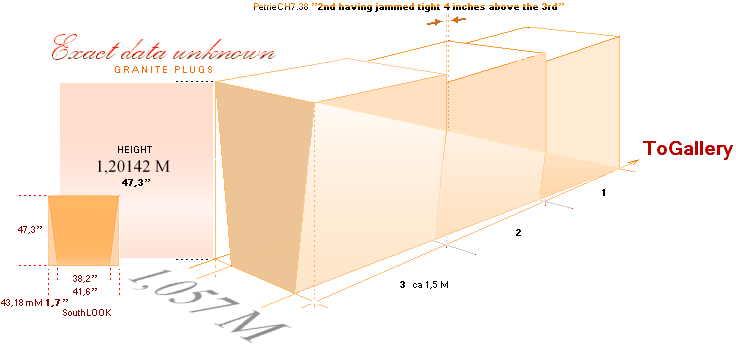
APPLYING PRECISE MEASURING QUANTITIES IN A VISUAL
PERSPECTIVE by artist’s pen, rulers, hand and paper HAS NO ESTABLISHED PREFERENCE
OR RECOGNIZED TEACHING FOUNDATION — as quoted[‡].
CHEOPS
RECTANGLE
Section Nov2017
—
Details inside Cheops Pyramid: The
Step
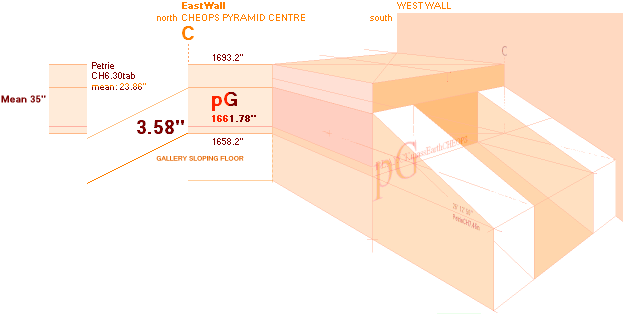
What? What are you talking about, »modern man»?
— Preciseness in SETTING EXACT quantitative measures in visual linear (or other) perspectives? No? EasyPiecy. When we know how.
— Modern Man: Get out of The Computer, and Test The Natural Way: Get BACK TO LIFE. USE the Tube. Don’t let IT (GOOGLE-MICROSOFT) use you.
Please DO make corrections IF untrue. Knowledge — nature — is our aim. Nothing else.
ELLIPSOGRAPH
No97
Sep1980
—
Details in Linear Horizontal Perspectives: ELLIPSES

Exercising Ellipses Math with
an Ellipsograph in 1980.
— They don’t know. Meaning:
— They don’t know.
BUT modern academic teaching system CLAIMS to Know — by Transposing Matrices: Rotation Matrix. What, exactly does that mean: Animated Transformers? Billion Dollar Computers? Hollywood’s ”Warning ... Prison”?
— Where is the practical pedestrian’s part of IT, the Practical KnowHow of it, the TodayIwillDoSome of IT? I don’t see any. Is there even a CUBE in there?
Book in. Book out. Lesson in. Lesson out. Hour in. Hour out. Generation in. Generation out. Grandfather in. Grandmother out. It’s called: culture. Merit. Education. PayGrade.
Very Educated Population. Very Instructive. MustBuyBook.
It seems — have been searched for, not yet found — that the HP-body[‡] is not at all known in modern quarters. But its rotational complex is — or rather seems to be known by the end result — by transposed mathematical methods that few individuals on Planet Earth do understand the practical meaning of underneath.
— Compare The Horizontal Equation: HOW TO DRAW SIMPLE AND EXACT VIEWS IN LINEAR PERSPECTIVE seems not familiar at all in modern academic quarters. Never mentioned. Never seen. Never heard of.
MANY EXAMPLES EXIST ON THE ACTUAL RESULTING VIEWS IN LINEAR
PERSPECTIVES. That is true. But in describing its fundamentals, the
contributions appear as the above quoted. That is, as in an underground room —
with no light at all. Pedestrians are left out. No enlightenment. No knowledge.
But the rotational orders are — or seem to be — known[‡]. However obviously in a manner leaving the practical details outside. Most Near Associated Resemblance: Like looking into a World Population of Complete Blindness: knowing, not knowing. Saying, not saying. Claiming, not claiming. Living, not really.
Wikipedia has no Article about IT Jan2019: The NATURAL ARTISTIC and Natural Visual Foundation of Linear Perspectives: The Hyperbolic Unit Body — Cheops Rectangle: Linear and Spheric. ONE natural base.
The ORIGIN OF ROTII — The MATHEMATICALLY DEDUCED
MATEMATISKT HÄRLEDDA EKVIVALENSEN MELLAN ROTI OCH ROTII
———————
Från sammanställda arbeten i perspektivgeometrin — Jun1981 ¦ Aug1984 ¦ Jun1998 — Jan2019
———————
See special English edition in
The
ORIGIN OF ROTII — the basic RotII-equations
Inledning: INTRODUCTION: RC12Theorem:
SAMHÖRIGHETEN mellan de bägge rotationskomplexen[‡] RotI och RotII beskrivs
retoriskt-illustrativt-intuitivt i den enkla ROTATIONSSATSEN[‡] med hjälp av en enklare Gyromodell[‡]:
RotI och RotII ger exakt samma resultat om samma vinklar och
värden från det ena rotationskomplexet tas i omvänd ordning mot det andra.
— Rot1 and Rot2 give exactly the same end result IF same angles
and values from one of the Rotation Complexes are taken in a reversed order
relative the other. It is named here: The Fundamental ROTATION COMPLEX THEOREM.
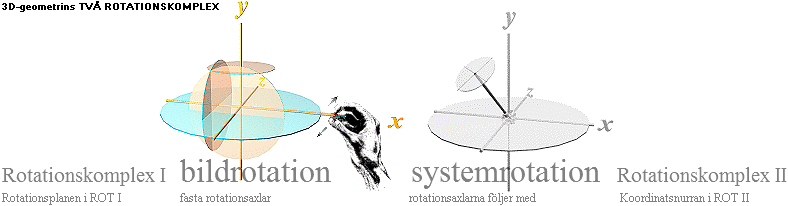
I följande sektion visas den rent matematiska-algebraiska
bevisgrunden till rotationssatsens giltighet. Bevisformen använder specifika
samband ur RotII som inte presenterats här tidigare i Universums Historia — på
grund av ämnets VÄL omfattande och sammansatta natur.
Nu Jan2019 befinner vi
oss i en något annorlunda situation
— CHEOPS REKTANGEL[‡] med tvärsyntes genom snart sagt allt möjligt
i fysik och matematik:
Alla utvecklingsdetaljer
i Universums Historia grundas HELT på den matematiska fysiken från CHEOPS
REKTANGEL:

Se även från MEL1 och MEL 2 ¦ SOLFYSIKEN I TNED TESTAS
Viss angelägenhet finns för att visa samhörigheterna mera både
på djup, bredd, och höjd.
— Verkligen djupintressant ämne eftersom intet — nada —
motsvarande av den mera enkla matematikens form syns i etablerad litteratur.
ALL TRIGONOMETRIC RELATIONS IN The
Most Simple PREFIXxSIN
— no derivatives, just plain basics
MATHEMATICAL DEDUCTION OF THE Rot1¦Rot2
EQUALITIES — mathematical proof
ONLY
UNICODE CHARACTERS ARE USED HERE IN ORDER TO INHIBIT CERTAIN WEB BROWSERS FROM
VANDALIZING ORIGINAL COMMERCIAL COMPUTER WORD PROCESSOR FONT WORKS — we
thought the computer era was developed for OUR convenience — an idea soon
proved to be a commercial sewer
————————————————
Synthesis
figures in The ORIGIN OF ROTII are scanned
copies of the original paper work with ellipses drawn »The ROTRING LetraSet Era» by a precision EllipsoGraph
(HAFF Ellipsograph Nr.97 — bookstore stuff
from the late 1970:s: can’t find it today 2019 to any reasonable price).
————————————————
FOR A GENERAL ACQUAINTANCE WITH THE PREFIXxSIN-BASOCS, SEE TABLES IN TRIGONOMETRY unless already familiar.
Compiled ROT I Equations:
All IMAGE 3D-ROTATIONS in Rot1 are made from the simple (AngularSumTheorem)
![]()
where (x¦y)2 is replaced by (sinW¦cosW)2 giving the general 3D-rotational simple format
x := x sinW – y cosW
y := y sinW + x cosW
By successively shifting the actual angles xyz(W°) on the same type xy-expression format with corresponding given or simultaneously calculated coordinates xyz, any 3D-rotation of any coordinate point xyz is performed.
The corresponding compiled Rot2-equations are more demanding. See separate section in The ORIGIN OF ROTII.
— Here we show how the correspond and communicate through the already observed »3D Rotation Complex Theorem».
![]()
Compiled ROT II Equations:
from Order No5 —
xMOD =
sin(yW+90)·sinxW·z + sin(atan[z’/x’]+yW+90)√(x2+y2)(1–[coszw·sinxW]2)
zMOD = cos(yW+90)·sinxW·z + cos(atan[z’/x’]+yW+90)√(x2+y2)(1–[coszw·sinxW]2)
yMOD =
cosxW·z + sinxW·coszw·r
Abbreviations:
x’ = sin(zw–90)·(√x2+y2)·cos(–xW)
z’ = cos(zw–90)·√x2+y2
zw = zW0+zW
Additional Conditions for atan applies:  .
.
The above given coordinate transformation equations by rotation in RotII are given in »the classic way». That is, with the elementary tangent conditions connected to the four classical quadrants of the circle — in order to determine the correct polarity of the coordinates for each specific rotation.
We will now show how the more sophisticated Rot2-parts EQUALS — give the same end result — as the simpler Rot1-parts — with respect to the stated »rotational theorem».
By straight indices (1 2) to clarify the deductive continuity:
ROT I — Equations :
zW xW yW
x1 = x·sinzW – y·coszW z1
= z·sinxW – y1·cosxW x2
= x1·sinyW – z1·cosyW
y1 = y·sinzW + x·coszW y2
= y1·sinxW + z·cosxW z2
= z1·sinyW + x1·cosyW
Equations in ROT I as above are now compiled in such a way to
express a final complete equative solution
explicitly for end coordinate x2,
explicitly for end coordinate y2 and
explicitly for end coordinate z2
with a reversed rotational order relative the RotIINo5
order:
![]()
yW
— xW — zW
As already observed (Rotation Theorem
¦ The
Theorem) by a simple visual investigation from The
GYRO-model, these two different complexes SHOULD give the
same end coordinate result.
— So: From this point we now investigate how the actual
equations from the two different complexes DO match
— if at all.
— WITH pedestrians included: basic deeply exact relatable math
only. Nobody is left out:
SECTIONx ¦ SECTIONz ¦
SECTIONy
SECTIONx: equations
for x
—————————————————————————————————
ROT I x
= (x·sinzW – y·coszW)sinyW – (z·sinxW – [y·sinzW +
x·coszW]cosxW)cosyW
x = (x·sinzW – y·coszW)sinyW – z·sinxWcosyW – [y·sinzW + x·coszW]cosxWcosyW ;
x1 = x·sinzW – y·coszW
=
sinzw·r ;
y1 = y·sinzW + x·coszW
= coszw·r ;
form RotIx
= sinyWsinzw·r – z·sinxWcosyW – [coszw·r]cosxWcosyW
ROT II x
= sin(yW+90)·sinxW·z +
sin(atan[z’/x’]+yW+90)√(x2+y2)(1–[coszw·sinxW]2)
x = –cosyW·sinxW·z +
sin(atan[z’/x’]+yW+90)√(x2+y2)(1–[coszw·sinxW]2)
form RotIIx
= – z·sinxW·cosyW –
cos(atan[z’/x’]+yW)√r2(1–[coszw·sinxW]2) ;
If equality for x holds :
sinyWsinzw·r – [coszw·r]cosxWcosyW
= –cos(atan[z’/x’]+yW)√r2(1–[coszw·sinxW]2)
sinyWsinzw·r – [ coszw·r ]cosxWcosyW = –cos(atan[z’/x’]+yW)r√(1–[coszw·sinxW]2)
sinyWsinzw – coszw · cosxWcosyW = –cos(atan[z’/x’]+yW)√(1–[coszw·sinxW]2)
; atan[z’/x’] = T
= –cos(T+yW)√(1–[coszw·sinxW]2)
;
cos(A+B)
= cosAsinB + sinAcosB
= –(cosTsinyW + sinTcosyW)√(1–[coszw·sinxW]2)
sinyWsinzw –
cosxWcosyWcoszw = – [cosTsinyW√(1–[coszw·sinxW]2)
+ sinTcosyW√(1–[coszw·sinxW]2)]
sinyWsinzw – cosxWcosyWcoszw = – cosTsinyW√(1–[coszw·sinxW]2)
– sinTcosyW√(1–[coszw·sinxW]2)] ;
We investigate
rear=right blocks in LeftRight rank-parts :
Vi undersöker bakre¦högra
ledblocken i VL¦HL :
cosxWcosyWcoszw = –sinTcosyW√(1–[coszw·sinxW]2)]
cosxWcosyWcoszw
= –sinTcosyW√1–[coszw·sinxW]2
cosxWcoszw =
–sinT√1–[coszw·sinxW]2
; –sin = sin ;
–cosxWcoszw = sinT√1–[coszw·sinxW]2
–cosxWcoszw/√1–[coszw·sinxW]2 = sinT ;
quadration
(SQUARING) eliminates minus sign:
√ [cosxWcoszw]2/1–[coszw·sinxW]2 = sinT
= sin atan(z’/x’)
;
z’/x’ = –cos(zw–90)/sin(zw–90)cosxW
;
z’/x’ = –sinzw/coszw·cosxW
= sin atan(z’/x’)
= 1/√1+(z’/x’)2
√ [cosxWcoszw]2/1–[coszw·sinxW]2 = 1/√1+(–sinzw/coszw·cosxW)2
=
sinT ; quadration eliminates
minus sign:
√ [cosxWcoszw]2/1–[coszw·sinxW]2 = 1/√1+(sinzw/coszw·cosxW)2 ; root
sign forwad:
√ [cosxWcoszw]2/1–[coszw·sinxW]2 = √ 1/1+(sinzw/coszw·cosxW)2
; quadration:
[cosxWcoszw]2/1–[coszw·sinxW]2 = 1/1+(sinzw/coszw·cosxW)2
; inverting both ranks:
1–[coszw·sinxW]2/[cosxWcoszw]2 = 1+(sinzw/coszw·cosxW)2 ;
transfer of [cosxWcoszw]2 ;
1–[coszw·sinxW]2 = [cosxWcoszw]2+(sinzw·cosxWcoszw/coszw·cosxW)2 ;
1–[coszw·sinxW]2 = [cosxWcoszw]2+
(sinzw·cosxWcoszw/coszw·cosxW)2
1–[coszw·sinxW]2 = [cosxWcoszw]2+
(sinzw)2
1 =
[coszw·sinxW]2 + [cosxWcoszw]2+(sinzw)2
1 =
cos2zw·sin2xW + cos2xWcos2zw + sin2zw
1 =
cos2zw(sin2xW + cos2xW) + sin2zw
1 =
cos2zw( 1 )
+ sin2zw
1 = cos2zw + sin2zw ;
Which we see HOLDS.
We investigate remaining two front=left blocks in LeftRight rank-parts :
Vi undersöker resterande två främre¦vänstra ledblocken i VL¦HL :
sinyWsinzw = – cosTsinyW√(1–[coszw·sinxW]2)
sinyWsinzw = – cosTsinyW√(1–[coszw·sinxW]2)
sinzw = – cosT√(1–[coszw·sinxW]2) ; holds with condition fot T incl.
–sinzw = cosT√(1–[coszw·sinxW]2)
√sin2zw/(1–[coszw·sinxW]2) = cosT ; quadration
eliminates minus sin zw:
√sin2zw/(1– cos2zw·sin2xW ) = cosT
√sin2zw/(1– cos2zw[1–cos2xW ]) = cosT = √sin2zw/(1– cos2zw + cos2xWcos2zw) =
√sin2zw/(sin2zw + cos2xWcos2zw) = cosT
√1/(1 + cos2xWcos2zw/sin2zw) = cosT
1/√1 + [cosxWcoszw/sinzw]2 = cosT
= cos atan(z’/x’)
;
z’/x’ =
–cos(zw–90)/sin(zw–90)cosxW
;
z’/x’ =
–sinzw/coszw·cosxW
;
z’/x’ =
–sinzw/cosxWcoszw
=
cos
atan(z’/x’) = 1/√1+1/(z’/x’)2
= cosT = 1/√1+[x’/z]2
1/√1 + [cosxWcoszw/sinzw]2 = cosT = 1/√1 + [cosxWcoszw/sinzw]2
Which we see HOLDS.
Vilket vi ser STÄMMER:
sinyWsinzw – cosxWcosyWcoszw
=
– cosTsinyW√(1–[coszw·sinxW]2)
– sinTcosyW√(1–[coszw·sinxW]2)]
B – A = B – A
Hence
equality holds for x.
Alltså gäller likheten för x.
Orig.1998VI30
SECTIONz: equations
for z :
—————————————————————————————————
ROT I z
= (z·sinxW – [y·sinzW + x·coszW]cosxW)sinyW + (x·sinzW – y·coszW)cosyW
z = z·sinxWsinyW – [y·sinzW + x·coszW]cosxWsinyW + (x·sinzW – y·coszW)cosyW ;
y1 = y·sinzW + x·coszW
= coszw·r ;
x1 = x·sinzW – y·coszW
= sinzw·r ;
form RotIz = z·sinxWsinyW – cosxWsinyWcoszw·r + cosyWsinzw·r ;
ROT II z = cos(yW+90)·sinxW·z + cos(atan[z’/x’]+yW+90)√(x2+y2)(1–[coszw·sinxW]2)
; cos(A+90) = cos(90–A)
= sinA
z = sinyWsinxW·z + cos(atan[z’/x’]+yW+90)√r2(1–[coszw·sinxW]2)
form RotIIz = sinyWsinxW·z – sin(atan[z’/x’]+yW)√r2(1–[coszw·sinxW]2) ;
If equality for z holds :
– cosxWsinyWcoszw·r + cosyWsinzw·r =
– sin(atan[z’/x’]+yW)√r2(1–[coszw·sinxW]2)
– cosxWsinyWcoszw·r + cosyWsinzw·r =
– sin(atan[z’/x’]+yW)r√(1–[coszw·sinxW]2)
– cosxWsinyWcoszw + cosyWsinzw
= – sin(atan[z’/x’]+yW)√(1–[coszw·sinxW]2)
;
atan[z’/x’] = T
= – sin(T+yW)√(1–[coszw·sinxW]2)
;
sin(A+B)
= sinAsinB + cosAcosB
=
–(sinTsinyW + cosTcosyW)√(1–[coszw·sinxW]2)
– cosxWsinyWcoszw + cosyWsinzw =
–(sinTsinyW + cosTcosyW)Ö(1–[coszw·sinxW]2)
cosxWsinyWcoszw – cosyWsinzw =
sinTsinyW√(1–[coszw·sinxW]2) + cosTcosyW√(1–[coszw·sinxW]2)
Checking: √3/28 · 0.4375 √3/28 √0.4375
We investigate
rear=right blocks in LeftRight rank-parts :
cosxWsinyWcoszw =
sinTsinyW√(1–[coszw·sinxW]2)
cosxWsinyWcoszw =
sinTsinyW√(1–[coszw·sinxW]2)
cosxWcoszw =
sinT√(1–[coszw·sinxW]2)
Det är samma resultat som från härledningen för x-delen[‡], där ekvivalensen
visades.
These ranks are precisely the same as the
previously checked x-ranks, see from cosxWcoszw.
Which we see HOLDS.
Således, likheten STÄMMER.
We investigate the remaining two front=left blocks in LeftRight rank-parts :
–cosyWsinzw = cosTcosyW√(1–[coszw·sinxW]2)
–cosyWsinzw = cosTcosyW√(1–[coszw·sinxW]2)
–sinzw =
cosT√(1–[coszw·sinxW]2)
Det är också samma resultat som från härledningen för x-delen[‡], där ekvivalensen
visades.
These ranks are also precisely the same as the
previously checked x-ranks, see from MinusSinzw.
Which we see HOLDS.
Således, likheten STÄMMER.
Hence
equality also holds for z.
Alltså gäller likheten också för z.
1998VI30
SECTIONy: equations
for y :
—————————————————————————————————
The remaining SECTIONy then becomes »Only A Walk in the Park»:
ROT I y =
(y·sinzW
+ x·coszW)sinxW + z·cosxW
y1 = y·sinzW + x·coszW
=
coszw·r
y = sinxWcoszw·r +
z·cosxW
form RotIy = sinxWcoszw·r + z·cosxW
= z·cosxW + sinxWcoszw·r ;
ROT II y
= cosxW·z + sinxW·coszw·r
form RotIIy = z·cosxW + sinxWcoszw·r ;
Here it is immediately obvious from the preparing format that the
y-connections are equivalent.
Här ser vi direkt efter den förberedande omformningen
att sambanden är ekvivalenta.
Således, likheten STÄMMER..
Hence
equality also holds for y.
Alltså gäller likheten också för y.
RotationComplexes I and II relate as each others reversals.
Which was to be shown.
Rotationskomplexen I och II
förhåller sig till varandra som varandras omvändningar.
Vilket skulle visas.
1998VI30
—————
END RotII.
— Why not MAC: What’sUp? I don’t see any[‡].
RotIIorigin: — From Compilation Origin of RotII Jul2007 — Induction and Magnetism —
IaMmath.doc
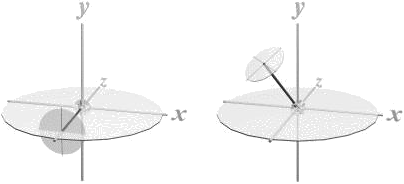
The
origin of Rotation Complex II — in
this History of The Universe
The ORIGIN OF ROTII
DOCUMENTS PRECEDING and preparing
Universes History
Introduction: R12origin
BACKGROUND — as original as can be:
From parents honouring ART and INSTRUMENTATION this child got »the basics» — already from square one. Drawing became an early MUST (as music).
— Towards the beginning of the 1970:s many artists had (recently) discovered the amazing works from the dutch graphician Maurits Escher[‡] — to whom this author have a special connection of admirability. Without Escher’s work — and all the people who admired his work and promoted others to study it too — this presentation would never have come about. But few direct mathematical descriptions on the subject of Perspectives were known by this author at the time. So it became urgent to find a more mathematical approach in clarifying the depths of it — if at all.

EXERCISE (left+: WorkCollection 1980-1995): When sufficient training has been spent on picturing natural forms, try this one — »proving the partnership»:
— Enter Apartment; Curtains down over windows; No outlook: Paper, lead pencils or whatever seems interesting: PICTURE HER FROM IMAGINATION. No photographic aids. No computer. No books. No magazines. Just YOU and HER — and a genuine Test: »Love me — or Leave me».
The student will KNOW. There is nothing to BELIEVE. No guessing around. No DOUBT. No PAIN. Just pure raw Natural Joy. ENERGY. AppleStuff.
Then we will know and see where the »I» of it is standing — at best, ready to try the deeper suit named Natural Mathematics: WITH Nature. NEVER against.

See also in REGULAR DIVISION OF THE PLANE
IN LACK OF DEEPER ENLIGHTENMENT in¦from established literature, this student began a deeper mathematical investigation on the subject: The Act of Perception by geometrical PERSPECTIVES.
— The illustration below shows the basic and very simple parts INTRODUCING the complete HORIZONTAL PERSPECTIVE complex by simple mathematics. In established textbooks the nearest terms found are ”one point perspective”, ”two point perspective” and ”three point perspective”, depending on application. But nothing of the like below has been found in established literature, so far — Despite its simplicity.
TheHOREQ: Rot2origin
THE HORIZONTAL EQUATION
THE HORIZONTAL EQUATION IN LINEAR PERSPECTIVES d = i·TanW
— Directly intuitive from simple plane geometry:
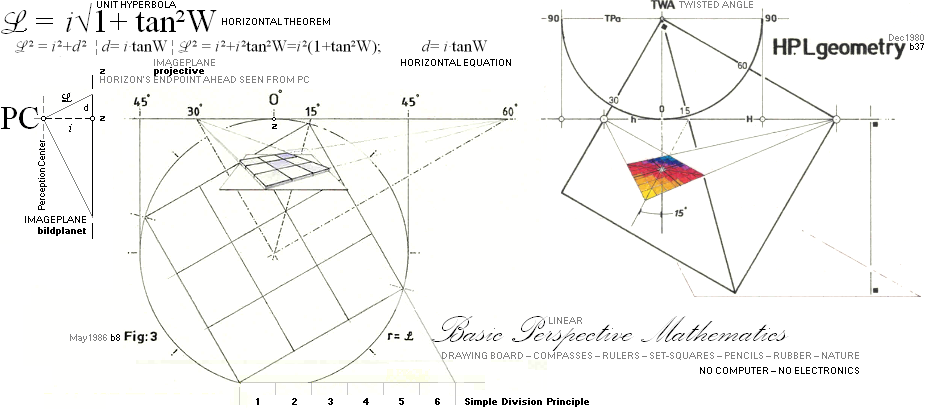
A WebSearh
13Feb2019 shows that at least one established educational source, seemingly, is
aware of the above basic horizontal principle. — However not in any mentioned
connection to »The
Real Steel Explaining» The Cheops Rectangle:
UNIVERSITY OF UTAH
— Department of Mathematics, High School Program Lecture: The Geometry of
Perspective Drawing on the Computer [www.math.utah.edu/].
— The Utah
source illustrates the principle in the section Using Vanishing Points And Measuring
Points in 8 illustrations. But the source gives no direct manually
directed perspective drawing description, although ’the same in context’.
Neither is anything said of The Circle in the section Analytic Treatment of the Perspective
View of a Circle, except this leading quest:
”But why is the image exactly the ellipse and not some other
closed curve?”
— Good Question
— Has Good Answer.
But the Utah source gives IT no mentioning — except this one:
”We shall answer this question by figuring out the equation
of the image of the circle on the perspective drawing. ”.
— They don’t
know: It’s NOT
the perspective. It’s the Plane Geometrical projection APPEARING — featuring — a
perspective (basicHPG)
— not known in modern quarters, as it seems. Cheops Rectangle — The Good
Answer in a pure and clean Vision: no math necessary. Just
Plane View.
Given  the simple xyzXYZ PILOTSYSTEM with
ImageIndex i
the simple xyzXYZ PILOTSYSTEM with
ImageIndex i
i — in general the distance
between the observer @PC and the ImagePlane: ImageIndex:
:
THE HYPERBOLIC PART explains the established terms
”one point perspective”, ”two point perspective” and ”three point perspective”,
depending on application:
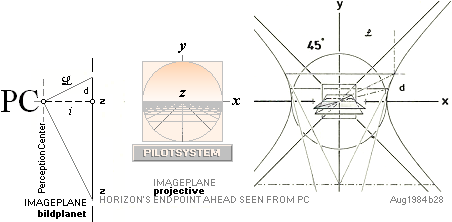
Left: COVERING ALL CASES AND SITUATIONS with our given xyxXYZ PILOTSYSTEM — you know: the one we consult in order to cross the street, drink coffee while reading the paper, and admire nature in general — a STEER¦Guide¦DIRECTIVE Cube SC has its corner @PC Perception Center, freely turnable. Its 90°45°90° degree preference makes the actual geometrical-mathematical transition from or through our natural intuitive perceptive view:
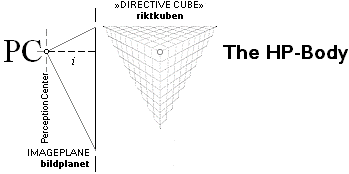
— Tilting SC straight up (or down) along the y-axis increases its
contacting length — from Image Index i to (H=![]() )
— with the intersecting ImagePlane:
)
— with the intersecting ImagePlane:
— As ![]() in the triangle
in the triangle ![]() id
is part of the SC top square —
diagonally or as a square side, depending on our choice of reference —
id
is part of the SC top square —
diagonally or as a square side, depending on our choice of reference — ![]() also, figure right above, has its same right
angle distance on the intersecting Image Plane as a new tilted (by the
twisting angle W°) Horizon Length (H=
also, figure right above, has its same right
angle distance on the intersecting Image Plane as a new tilted (by the
twisting angle W°) Horizon Length (H=![]() ).
).
— So the simple mathematical bottom line is, from The Horizontal Equation d=i·tanW, that
H2 = i2 + d2 = i2 + d2 = i2 + i2·tan2W = i2(1 + tan2W) giving us directly the unit hyperbola equation
H = i√ 1 + tan2W = i√ 1 + x2 with x as the hyperbolic variable:
— TILTING by a given coordinate axis xyz in any direction a given coordinate plane (XYZ) defines the Horizontal Perspective Body by its perspective endpoints — where all perspective parallel lines meet in the endless — intersecting the xy-image system’s Unit Hyperbolas. In all a CUBE-oriented three point basic perspective limit point triangle then appears — for any basic XYZ.horizontal tilt.

The STEER-Cube’s projection on the image plane[‡] shows a 3-set triangular block.
— Each triangle represents an individual XYX-horizon. The horizon is split by a normal (c) through PerceptionCenter (3). So, each one of the right angular triangles — each horizon’s own seen square and its intersection with the ImagePlane — obeys the simple but (very) powerful
CHEOPS RECTANGEL (Cheops Rectangle)
equation ab = ![]() 2. The actual ImageIndex i is then given
from any inside projected (vertical in the figure below) ab-horizon
as i2 = ab.
2. The actual ImageIndex i is then given
from any inside projected (vertical in the figure below) ab-horizon
as i2 = ab.
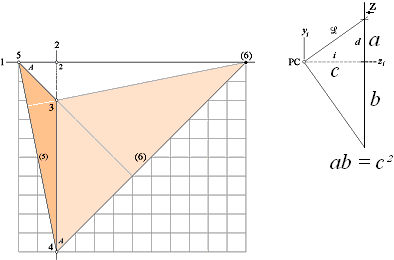
STEERcube’s
projection on the ImagePlane:
— Inner HIDDEN right angle
ab=c² = CHEOPS
RECTANGLE
i = 4 ¦ a=2, b=8 identifies the actual
HP-body.
—
FAMILIARIZE on the subject:
Use
only square-printed paper, draw any triangle with corners in crosses between
squares, which simplifies all eventual mathematical calculations.
With
sides given, the Horizontal Equation with CHEOPS RECTANGLE as above solves
specific issues for each horizontal plane.
— See CHEOPS
RECTANGLE how we — easily — find each XYZ-horizon’s horizontal INDEX with
very simple tools — we don’t even need a CALCULATOR. Really.
The unit hyperbolic connection is simply deduced in detail as follows:
— STEER-cube TILTED shockingly simple:
IT IS THE CUBE PREFERENCE THAT MAKES IT — WITH ITS STRAIGHT ANGLES
THE HORIZONTAL THEOREM — from TheHOREQ
The Horizontal Theorem — from The Horizontal Equation’s perspective view: The Steer Cube, or the GUIDE cube, or The Directive (Directional) Cube:
——————————
H = ![]() ; HORIZON LENGTH:
; HORIZON LENGTH:
i ; IMAGE INDEX
d/i = tanW° ; HORIZONTAL EQUATION directly from simple plane geometry;
= x ; functional variable;
d = ix ;
H2 = i2 + d2 ; simple STEER CUBE TILT W° by vertical distance d:
= i2 + i2x2
= i2(1 + x2) ;
H = i√ 1 + x2 ; UNIT HYPERBOLA — LinearHORIZONTAL PERSPECTIVE HORISONTAL THEOREM: The HP-body.
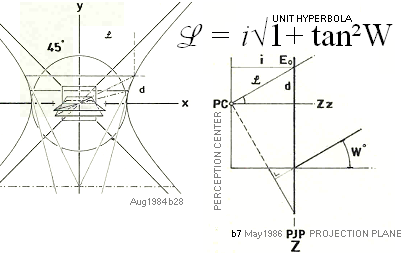
The HORIZONTAL
THEOREM: ![]() = i√ 1 + (tanxW)2.
= i√ 1 + (tanxW)2.
THESE BASIC ELEMENTARY PERSPECTIVE CONNECTIONS (1978-1984) lead further to a compiled general method for handling the HP-body in a general RotationComplex: How to rotate a given object’s xyz-axes with their XYZ-planes in any arbitrary way by successively adopting new rotational axes as they change with each rotational step with defined new planes and horizons.
By summer 1981 a compilation was finished with the mathematical connections for successive HP-rotations in Rotation Complex II of the following comprised form:
— The original has explicitly written equations for each case. However, as the difference between the individuals consist only in different combinations of axes xyz and planes XYZ, the more simplified extract below says the same thing:
RotationComplex II — Jul1981 — TheHOREQ
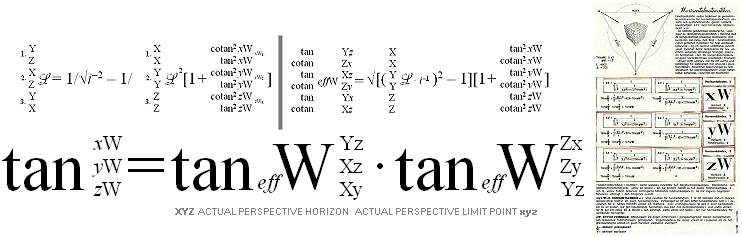
Jul1981 b3,29
Short description:
(xyz)W = 0; HORIZONTAL INDEX = i. Each equation for horizontal
length ![]() is a successive equation relative a given
horizontal index. The initial position is to set a horizontal index as i
in the
is a successive equation relative a given
horizontal index. The initial position is to set a horizontal index as i
in the ![]() -equation.
Is from here the value of the rotational or twisting angle W set as 0 or unit
multiples of 90 degrees, the resulting horizon equals zero — conv. central
linear perspective. All other values for W gives a value for
-equation.
Is from here the value of the rotational or twisting angle W set as 0 or unit
multiples of 90 degrees, the resulting horizon equals zero — conv. central
linear perspective. All other values for W gives a value for ![]() between i and endless. This value then
becomes in its turn a horizontal index for coming horizons honXhonYhonZ.
between i and endless. This value then
becomes in its turn a horizontal index for coming horizons honXhonYhonZ.
eW, EFFECT ANGLE (effW). The effect angle specifies the
difference in perspective degrees between the horizon-zero (![]() -normal
through PerceptionCenter) and, respectively, rotational axis’ perspective
limit point. The tangent values for these angles are, with respect to the two
limit-points along a given horizon, each others inverse.
-normal
through PerceptionCenter) and, respectively, rotational axis’ perspective
limit point. The tangent values for these angles are, with respect to the two
limit-points along a given horizon, each others inverse.
SIX POSSIBLE BASIC ORDERS or different ways exist to relate a complete three axis rotation in RotationComplex II:
In our history of a further development of the complex, the number 5 order was chosen to focus a deduction leading to a general RotII mathematical synthesis.
— It is namely so
— see MATHEMATICAL DEDUCTION OF THE Rot1¦Rot2 EQUALITIES, the RotII-base of which will be explained below
— that in the end of this result in investigating Rotation Complex II, a most simple connection (same values in reversed order, RotationComplex Theorem) between Rotation Complex II and Rotation Complex I was found. With this correspondence we are free to choose from any of the six mentioned orders by a simple reversal from the much more simpler Rotation Complex I.
The
rotation order yxz in Rotation Complex II
With the order of rotations given as (yxz)W, W indicating the rotating angle, specifically as |yW|xW|zW|, we can see (perhaps almost directly, with the help of the given illustration below) that a general space point P(xyz) in the fix Image System (K), about to be rotated by rotation complex II in the order (yxz)W, will be defined by a MOST SIMPLE gyroscopic »Coordinate Top», like a spinning wheel on a rod:
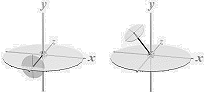
Left: The zero-set
coordinate top in Rotation Complex II for a given point P(xyz).
P(z) will be the length of the rod or The zAxel whereon the top wheel is set spinning;
— The RODzAXEL is then associated with rotation yW (as seen from above or down on the Y-plane floor);
— Rotation xW will be the rod’s projective shortening (as seen from the same view);
— P(x) och P(y) will be the point position encircled by the top’s spinning peripheral wheel-circle associated with the final spin rotation zW in that circle.
The following illustrations after the Ellipsograph article show by example how this described type rotation (RotII) was detailed.
Simple Ellipsograph instrument helped to develop the
complex — by precise elliptic illustrations
Some
figures here in The ORIGIN OF ROTII are scanned
copies of the original paper work — »The
ROTRING and LetraSet Era» — with ellipses drawn by a precision
EllipsoGraph — HAFF Ellipsograph Nr.97. By that time: Ordinary bookstore stuff
from the late 1970:s; Can’t find it today 2019 to any reasonable price;
— A
WebSearch 7Feb2019 tells that eBay has the true (1
or two, pre-owned) HAFF no97 ”ellipsographo” — ”573.77 SEK” resp.
”678.09 SEK”.
— My
recommendation would be: buy it — if a serious WoMan in Math and Geometry.
Absolutely. Some few basic details are given here how it works.
Problem: The instrument is no longer in production: Is is an Antique
”selled to highest bidder”.
— But
for Swedes (AND OTHERS): be aware of a company named UPS intrinsically unable
to explicitly in writing guarantee and recognize human rights as the foundation
of the company’s enterprise, as experienced with still unsolved details
who with no notice hi-jacks packets from foreign countries not
allowing the internal domestic post-system to handle the package delivery and expects private persons to act as a company: Unless
at home the company
travels around the apartments with their own vehicles, further contributing to
an already heavily air polluted environment, forcing individuals to consent
without any agreement, or not responding
when contacted, the UPS is — reported by hundreds of people (eniro.se), including example of legal threats
if not extra payment is made — confiscating the package, with a reported really very
disrespectful behaviour. Some persons report that they never received the pack
from, for example, USA.
This is a worst, and most sad, example of
”a supposed free world market”, in practice consumed by fascistic attitudes[‡], real bad
ass mentalities, making it impossible to have a world wide free trade:
— We
apologize for our wrong, but we are unable to make a correction. Humanity in
prison.
It SHOULD be in the interest of every
nation and state to get rid of such sewer company ATTITUDES. No action:
— We are not
obliged to obey or promote human rights:
Sweden before WW2, Sweden especially during WW2[‡], and Sweden
certainly most exclusively after WW2.
Tell me about it. So: The Sewer Companies
Thrives — with a continued local populated respectful attitude
extinction: Tenants are — literally — locked in by landlords, reported to
Swedish authorities with no response, refusing to take any notice on human
rights. The situation seems »worse than around 1932»: A self-proclaimed
authority oppressive attitude (2010+) is spreading in the society like
an unimpeded wildfire: public surveillance, and growing. No human rights
mentioning. Not one word. 1932.
TRY THIS ONE, UPS Sweden + Associated: Attitude — opinion, claim, statement, thought, apprehension,
idea, notion, interpretation: mind, sense, UnameIt — outside the recognition of human dignity,
human rights, IS PRACTISING
OPPRESSION: Fascism, Nazism, Dictatorship, Devilship, Satanism — Pick one: A01 UDHR10Dec1948. ZipIT.
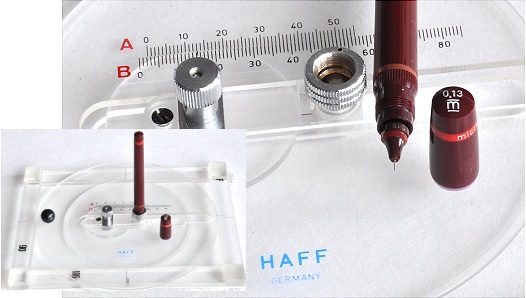
PHOTO:
28Jan2019 NIKON D90
The HAFF Ellipsograph
Nr97 — long before ”The Computer Age”: Two 2mM thin 0.23 M × 0.18 M cross
mounted Plexiglass xy-slides hold milled slots for circular Plexi plates
screwed together on a setting middle slide with a Rotring adopted pen slot for
precise elliptic drawing, as well as an adopted Ø2mM lead-pen drawing
interface. Precise cross markings for a xy-centre guarantees very precise
ellipse drawings with fine (0.1mM) Rotring ink-pencils or a sharply dressed 2mM
lead pin.
ELLIPSOGRAPH PRINCIPLE:
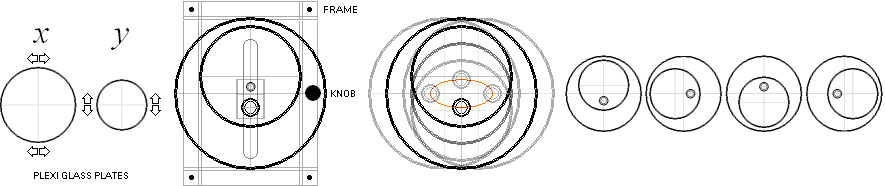
Two XY plexi
glass plates mounted on a xy Plexi glass frame with milled plate slots are
screwed fast by a middle adjustable slid. The figure shows such a fastening
position between the two plates with a central uptake for a pencil. By pushing
on the Knob — fastened on the top greatest plate — the two plates are driven to
their extents in their respectively xy-slots, performing an ellipse, orange in
figure. Precision Scales on the settling slid allow very precise elliptic
drawings.
— IN TIME, with much use, a small play
in the slots will decrease the preciseness of the drawing (normally within
1/100 mM = 0,0003937’’). This is easily adjusted by mounting slot-narrow
stripes of (thin) paper in the slots with fast holding tape at the ends,
considerably extending the precision lifetime of this very fine drawing tool.
Example below from works in Sep1980 — Linear Perspective Mathematics EPSonML.
Exercising
Ellipses Math with an Ellipsograph in 1980.
— See The
EPSmath — how circles in 3D-world are precisely drawn as ellipses in
Linear Perspectives.
The RotII Complex Order No5 Synthesizing
deductions
Below is given the final and actual deductions leading to the more comprised 3 RotIIno5 equations central in the final proof where the two rotational complexes merge into one. See The EQUIVALENCE OF ROTI AND ROTII.
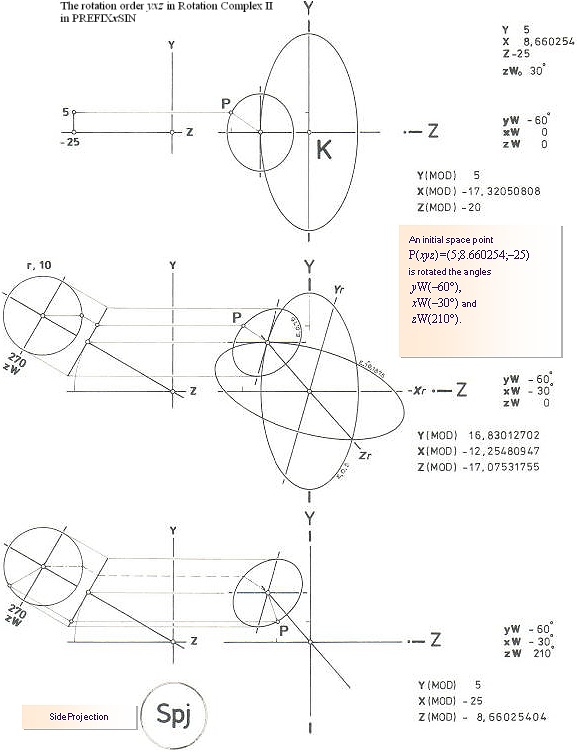
Nov1983
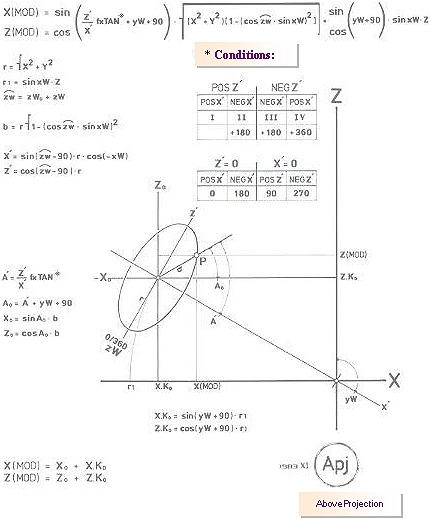
Nov1983
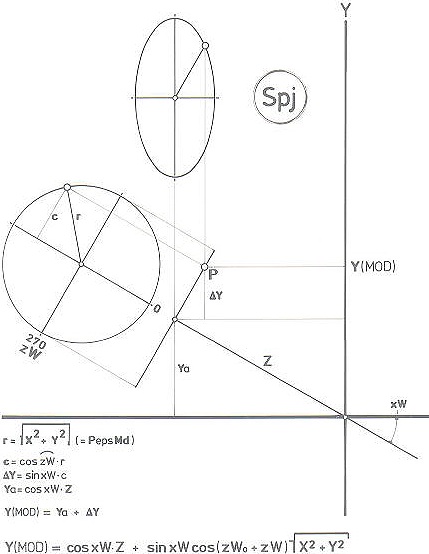
Nov1983
So having extracted the three central equations in RotIIOrderNo5
xMOD =
sin(yW+90)·sinxW·z + sin(atan[z’/x’]+yW+90)√(x2+y2)(1–[coszw·sinxW]2)
zMOD =
cos(yW+90)·sinxW·z + cos(atan[z’/x’]+yW+90)√(x2+y2)(1–[coszw·sinxW]2)
yMOD =
cosxW·z + sinxW·coszw·r
the rest of the history relied on proving The EQUIVALENCE OF ROTI AND ROTII.

Free
Fantasy Details in WaterColorPainting from 31May1993 — Mathematics
From The Beginning.
Hand, eye, pencil. Development of the individual’s INSIGHT into Nature by practical study:
ARTISTRY — as far as here known — in general is the only way for a human to grow a real and true in-sight.
STRUCTURES AND PATTERNS definitely promote the study of Mathematics.
See ”Final Countdown” in
Proving The MATHEMATICAL EQUALITY BETWEEN THE TWO ROTATIONAL COMPLEXES.
FjäderAnaloginKcellen: Maj2004 ¦ Jun2012 ¦ Feb2019 — APPENDIX
 SCHEMATICALLY ILLUSTRATED
SCHEMATICALLY ILLUSTRATED
The TNED Atomic Nuclear
angular momentum J0K
+ 3J1K = 0 guarantees a practically none nuclear
geometric deformative tendency before the nucleus as such splits — or rather answers
the indtruding force by throwing it back. In a dense large highly
gravitationally compressed sphere, such a reaction inevitably is equivalent to
a nuclear generated Detonation: a spring analogy.
EXPLAINING K-CELL DETONATION FROM TNED
— basic TNED-kosmology
FJÄDERANALOGIN — Spring Analogy
How The Incompressibility of the Atomic Nucleus
responds to mechanical pressure
ALLMÄNNA SAMBAND FÖR ATOMKÄRNANS MEKANISKA FORMHÅLLFASTHET ENLIGT RELATERAD FYSIK — K-cellens Detonation
EFTER
htm-kopia 9Jun2012 från originaldokumentet (Maj2004) i MsWORKS 4.0
Fjäderanalogin.wps
Förarbetena till K-cellens DETONATION[‡]

— detaljerat försök att härleda ELEMENTÄRA fysikgrunder enligt
TNED för K-cellens allmänna pulsfysik från TNED-kosmologins framvisade ALLMÄNNA TILLSTÅNDSLAG[‡].
— Se även delvis mera utförligt — vidare — från SOLSYSTEMEN I
VINTERGATAN[‡].
2004V1
SAMMANSTÄLLNING
— K-cellens detonation
Graf y =
[1+(x)'–2]'–1
Sammanställning med beteckningar och
samband:
G-offset ................... xsK =
(kf xf /ϖFsK + 1)–1
....................... per
neutron i K-cellen ; Variabeln är r, se nedan i FsK
x+G-offset
............... xa =
(kf xf /ϖ(FsK+F0) + 1)–1
.............. per neutron i
K-cellen
detonationsintrycket x =
xa–xsK
........................................... per neutron i K-cellen
xmax = 0,117dmax
statiska
g-trycket pJ =
FKcell/AKcell = FKärna/AKärna ; gäller exakt i varje ekvipotentialyta
statiska g-kraften FsK = kfxf xsK/(1–xsK)ϖ , = pJAKärna= πG(2πrr0r/3)2 ; Variabeln är r.
r0c =
(3/8Gπρ)1/2c0
c = (c0/2)[1 – √ 2(r/r0c)2–1]
divergenskoefficienten ϖ = (2–c/c0) = 2 – (1/2)[1 – √ 2(r/r0c)2–1] ; x
gäller bara från ϖ>2
neutronradien r0n = 1,32 t15 M
max axiellt
intryck dmax = xf = r0n/N ; Nmin=1000
” xf = dmax
neutronformstyrkan kf = k9T9(918e1,602t19)2/xf3
K-cellens täthet5T9år ρ = 1,67241 t28 KG/M3 (en väteatom per 10 M3 rymd)
K-cellens radie5T9år rc=0 = (ρ)–11,60841 T26
KG/M = 9,80679 T26
M ......... referensvärde
Synradie5T9år rVIS =
ca 3 T25 M eller ca 1000
Mpc med massan ca 2 T49 KG
K-cellens massa5T9år m0K = rc=0(1,48427 t27 M/KG)–1 = 6,60714 T53
KG
K-cellen
vid max täthet:
antal neutroner Nn =
m6,6T53A6,023T26/U1,0086652 =
3,94103 T80 ~ 4 T80
täthet ρmax = 1,82 T17 KG/M3; från neutronkärnans omskrivna
rätblock, se r0n
radie rKmin = (3m6,6T53/4pr1,82T17)1/3
= 9,531 T11 M
g-energi EG = G6,67t11m6,6T532/r9,5T11
=
max 3,000 T85
J K-cell contracting-detonating energy constant
THE GENERAL ENERGY BUDGET TO KEEP IN MIND IN ATTEMPTING TO EXPLAIN ALL THE DETAILS
EKVIVALENTA Data vid K-cellens maxtäthet ρmax som satisfierar de observerade värdena från
rödförskjutningen [‡R] ENLIGT RELATERAD FYSIK vid de nu synligt mest
avlägsna delarna (ca 1000 Mpc eller ca 3 T25 M):
detonationsenergi Ekin = m6,6T53v7,5T92/2
= max 1,856 T73
J
=
ED
detonationskraft F0 = Ekin/(xf=dmax)
= min 1,406 T91 N ; g-kraften
3 T73 N
försumbar
Detonationsintrycket med xmax=0,117dmax blir i den motsvarande realiteten grymt mycket mindre. v7,5T9 i Ekin minskar från ytan och är noll i K-cellens
centrum (vr=v7,5T9[r/rKmin]) vilket ger ett xmax=(1,82t10)dmax med dmax=r0n/1000.
Det resultatet betyder
tydligen att
atomkärnan är fruktansvärt — ofattbart — hård.
Antaget
medelvärde för rödförskjutningarna motsvarande de mest avlägset synliga delarna
ENLIGT RELATERAD FYSIK:
λ/λ0=(1–v2T8/c3T8)–1=3 [Se mera utförligt i K-FORMEN ¦ m0cK1]
K-cellens detonation, fjäderanalogin
Härledningar — DEDUCTIONS
FIGUREN FRAMHÄVER EN STARKT ÖVERDRIVEN DEFORMATION FÖR ATT
FÖRTYDLIGA HUVUDSAKEN: dMAX [r/1000]
Se särskilt ATOMKÄRNANS INKOMPRESSIBILITET[‡] om ej redan bekant.
Inledning:
GRUNDBEGREPPEN TILL TERMINOLOGIN SOM ANVÄNDS HÄR GES FRÅN DE FÖRSTA FEM KORTA DELAVSNITTEN i Härledning från Kraftlagen DEL I ¦ DEL II ¦ DEL III ¦ DEL IV ¦ DEL V ¦ DEL indexVI ¦ DEL VI — förarbetet till Del 6: K-cellens detonation. Vi fortsätter därifrån med det korta repetitions- inledningsavsnittet nedan med efterföljande Del 6 med de sista 5 korta sektionerna, detaljernas slutliga inpassning i helheten.
DETALJERAD FYSIKBESKRIVNING ENLIGT ANVISNINGAR FRÅN TNED
GENOM ATOMKÄRNANS HÄRLEDNING[‡] — ALLA SATSBILDER ÄR eller
ska vara relaterbara FÖLJDSATSER UR DE ENKLA PREMISSER SOM GRUNDLAGT
ATOMKÄRNANS HÄRLEDNING, eller så inte alls.
Styrkan i atomkärnans formhållfasthet kan återföras på STRUKTUREN I hela dess
samlade laddningsinnehåll
Q = Z(1818e+18e–mD) .......... se NEUTRONEN och NEUTRONKVADRATEN
genom
uppdelningen i ±β-komponenterna
tagna över kärnans maximala ihoptryckning eller deformationsmaximum (dmax=xf).
För neutronen
med massdefekten noll gäller Q=918e.
DEN
FORMBEVARANDE Styrkan (kf) återförs på divergenskraften F=k9T9(Q/xf )2 över deformationen xf enligt
F/xf=kf=k9T9Q2/xf3
kf konserveras av atomens allmänna impulsmomentsekvation[‡]
J0K+3J1K=0 där negativ divergens ingår enligt DEL I
Fc0
– Fc – FG = 0 ................ vektorekvivalenterna mot FG utbildar negativa Fc
Kärnans totala
struktur är ENLIGT TNED grundad på FG jämte ovanstående vektorled. (Se ATOMKÄRNANS HÄRLEDNING[‡]). Impulsekvationen garanterar att kärnan alltid
svarar med samma kraft som den vilken söker ändra dess tillstånd. Denna
egenskap gör det omöjligt att ”döda” atomkärnan genom att påföra den tryck.
Utsätts kärnan för ”oändligt deformerande tryck” svarar den med ”oändligt
deformerande mottryck”.
Atomens allmänna impulsmomentsekvation J0K+3J1K=0 bygger på växande täthet med växande
fraktaldjup. I ekvivalent analogi betyder det att atomkärnans
ytform är oändligt
tät[‡]. Det betyder också att kärnan gör motstånd
mot komprimering med exakt den kraft som söker genomdriva den i
impulsekvationens bevarande.
— Genom
kärnans fraktala ringstruktur har atomkärnan (således) en mycket begränsad
möjlighet att uppvisa någon direkt deformation. Det innebär att kärnan tvingas
uppvisa en motsvarande begränsad axiell ihoptryckning vars gränsläge
motsvarar oändligt motstånd. Eller sagt på annat sätt: För att kärnan ska kunna
avgöra exakt vilken kraft det är fråga om, måste den ha en viss elastisk
slaglängd eller mätlängd (dmax). Men det innebär samtidigt att dmax aldrig exakt kan uppnås: FORMEN måste —
tvunget — ställas på en motsvarande asymptotisk (exponentiell)
matematisk form.
EFTERSOM det
således inte ENLIGT TNED går att platta ut
atomkärnan, nolla ut den i en tryckanalogi, leds vi — i varje möjlig
»fjäderanalogi» — till INSÄTTNING av ett fast och fixt absolut TRYCKSTOPP
(dmax):
— Ett dmax kan omöjligen uppnås: »oändligt kraft+»:
motkraften växer tvunget proportionellt med samma belopp.
NEUTRONKÄRNANS
MAXIMALA IHOPTRYCKNING I HÖJDLED (dmax) måste alltså vara absolut gränslägesbestämd.
—
Impulsekvationen med tyngdcirkelns bevarande J0K+3J1K=0 kan då sägas eller påstås innefatta
egenskapen att
• atomkärnans deformation resulterar i en motkraft som växer
oändligt med oändligt växande tryck.
2004-10-18. Denna detalj ansluter idealt till elektriska kraftlagen: F=k(Q/r)2: om r går mot noll obegränsat växer
också F obegränsat, Q givet. Slaglängden för kraftens utbildning avtar
emellertid analogt och verkar under allt kortare distanser. Men den finns där.
— Man kan på
detta sätt säga att deformationen hos atomkärnan driver dess struktur mot
elektriska kraftlagens idealform med Q som en obegränsat liten lokal.
Se vidare i
slutet med grunderna mera i detalj — Härledning från kraftlagen.
En vanlig
makroelastisk kropp, efterlämnar alltid en större eller mindre deformation
efter varje påverkan. Atomkärnan har ingen sådan defekt: atomkärnan är förlustfri, den varken
avger energi i sin funktion eller kräver energipåfyllning för att fungera.
Atomen/atomkärnan (enligt TNED) är den
perfekta ideala elastiska kroppen som alltid strävar att bevara sin form
fullständigt enligt J0K+3J1K=0. Alla krafter som strävar att ändra kärnans
form, återförs därför till sina ursprung.
KONTAKTERANDE TRYCK innefattar hela atomkärnans ±β-struktur.
DISTANSTRYCK innefattar endast atomkärnans Coulombiska laddning Ze.
REAKTIONSTIDEN för kärnans formåterställande vid deformation återförs på närliggande ringar i kärnans
fraktalstruktur. Då denna besitter obegränsat djup återförs också
reaktionstiden på motsvarande obegränsat små rum. Eftersom dessa kärnelement
verkar överallt samtidigt i hela kärngeometrin blir reaktionstiden analogt
obegränsat kort. Reaktionstiderna bestäms alltså helt enkelt av den allmänna
mekaniken via kraftverkan enligt Galilei-Newton där accelerationen a=v/T=2d/T2. Dvs., T=2d/v. Snarare än
någon inneboende egenskap i kärnan som bestämmer hur den ska reagera på
deformation, bestäms således detaljerna av orsaken. Alltså utifrån
kommande intryck. Kärnan själv bidrar bara med tryckstoppet (d), samt
formstyrkan kf.
DEFORMATIONSKRAFTENS
VARIATION DEL
II dF/dx=F’ inom intervallet xf=dmax
återförs på divergenskraftens variation genom inverterade kvadraten på resten
mellan tryckstoppet dmax=1 och intrycket x enligt 1/(1–x)2. Nollavstånd för divergenskraften betyder
”oändlig kraft” vilket här motsvarar fallet x=1 — som aldrig
uppnås.
Varianten F’=dF/dx=(1–x)–2 ger då integralen F via
differentialekvationen
dF = (1–x)–2 dx ;
F =
![]() (1–x)–2 dx
(1–x)–2 dx
= (1–x)–1 ;
F(0) = 1 ; bestämda
integralen blir:
F = (1–x)–1 – 1
= x/(1–x)
= [1/x – 1]–1
ENHETSFORMEN
för x-variationen mellan 0 och 1=dmax har reala metriska distansen dmax eller med samma innebörd xf. Deformationen dämpas absolut av formstyrkan kf. Med dessa konstanta koefficienter ges, realt metriskt,
F =
kfxf x/(1–x)
kf = k9T9Q2/xf3
Divergenskoefficienten: ϖ »omega-pi» (»OmPi» ¦ PiOm: [»pjom»])
DIVERGENSENS
ÄNDRING MED GRAVITATIONEN utverkar generellt divergenskraftens lokala variation
genom divergenskoefficienten DEL III ¦ DEL IV c/c0. c bestäms av gravitationskraften. I normala sammanhang är c/c0=1. I den avancerade kärnfysiken däremot har divergenskoefficientens
variation högst avgörande
betydelse.
NEGATIVA DIVERGENSKRAFTEN som följer av det allmänna kraftvektorledet enligt TNED
Fc0 – Fc – FG
= 0
............. vektorekvivalenterna
mot FG utbildar
negativa Fc
medför att
divergenskoefficientens variation med varierande c ges på formen (”v”
för ϖ i Symbol)
ϖ = (2–c/c0)
Toppdivergensen
c=c0 ger då ϖ=1, nolldivergensen ger ϖ=2, samt vidare
positivt uppåt obegränsat med växande negativ divergenskraft Fc.
Växande v DEL V dämpar alltså F, men gör
samtidigt F-variationen brantare så att stora variationer i F ges på allt
mindre variationer i x.
Kraftändringen totalt för hela komplexet kan då skrivas
F = kfxf x/(1–x)ϖ .................... atomkärnans uppförande vid axiell deformation x
Resultat,
Grafisk representation
— neutronen
F = kf dmaxx[(1 – x)(2–c/c0)]–1 ; 0 ˂ x ˂1
kf =
k9T9(918e)2/[dmax]3
DEL I ¦ DEL II ¦ DEL III ¦ DEL IV ¦ DEL V ¦ DEL indexVI ¦ DEL VI — förarbetet till Del 6: K-cellens detonation
DEL VI: Deformationskraftens tillämpning på K-cellen,
Detonationssambandet —
statiska g-trycket och statiska g-kraftens inverkan
Sektioner 1-6:
Sektion 1 ¦ Sektion 2 ¦ Sektion 3 ¦ Sektion 4 ¦ Sektion 5 ¦ Sektion 6
DEL VI SEKTION 1: Det passiva kärnyttrycket från den negativa[‡]
divergensen
GRAVITATIONEN
i en sfärisk masskropp J i lokaler där ϖ>2 utövar ett kontinuerligt formstatiskt kontakterande PASSIVT
EKVIVALENT divergenstryck på atomkärnan K från ϖ=2 och uppåt enligt ekvivalenterna
FJ/AJ=pJ=FK/AK
Suffixet J avser J-kroppen och suffixet K atomkärnan.
Det passiva
trycket resulterar INTE i någon aktion från atomkärnan, utan påverkar bara dess strukturdjup med en
förskjutning av brantheten för kf.
G-yttryckets
ekvivalent är
pJ = mJ a/4πr2 = mJ(GmJ/r2)/4πr2
Kärnytparametern
AK avser hela
kärnytan; Gravitationen reglerar divergensen och därmed den DEN FORMBEVARANDE
Styrkans EXPONENTIALFORM (brantheten) för kf i atomkärnan. I
behandlingen av neutronen-protonen med radien r0 gäller approximativt
AK= (πr0)2
..................................... toppspinnets
kärnyta
I
DISTANSTRYCKANDE ANALOGIER sätter vi
FK = pJAK = k9T9(e/nd)2
där n
är en konstant som sammanhänger med laddningsgeometrin i distansverkan [Se termogravitella jämviktstrycket].
DEL VI SEKTION 2: Statiska g-kraften, statiska g-trycket
Kontakterande tryckanalogier kräver däremot hela kärnladdningens
singulärkomponent i ±β-strukturen
(Q=918e för neutronen) enligt
FK = pJAK = k9T9(Q/xf )2
G-tryckets inverkan på kärnan betraktas på detta sätt inte så mycket
utifrån en föreställning om riktningsvektorer som utifrån ytgravitationens
inverkan på divergensen i kärnans omedelbara närhet och därmed inverkan
på den kopplande formbevarande styrkan kf.
Variationen i
FK kommer alltså att
ansluta till variationen i föregående härledda deformationskraft F så att vi
får atomkärnans statiska g-deformation (via x) eller statiska g-kraften
FsK = pJAK
= kfxf x/(1–x)ϖ
...................... statiska
g-kraften
pJ =
FKcell/AKcell = FKärna/AKärna
.......... statiska g-trycket,
gäller exakt i varje ekvipotentialyta
x relateras här direkt till sK utan
suffix. Denna deformation är PASSIV
och utverkar inget EGENTLIGT REKYLTRYCKANDE arbete på atomkärnan (som resulterar i en
rekylkraft), utan endast förskjuter reaktionspunkten, den bevarande formkraften, längre ner i
kärnstrukturen. [Typgrafen i TNED141A.BMP].
Därmed kan vi beräkna det avsnitt av x i F som bortfaller på
grund av statiska g-trycket i
fallen där divergenskoefficienten ϖ>2. Aktiva deformationsintryck på atomkärnan
kommer att ha detta x-värde som ett OFFSETVÄRDE. Efter mellanräkningar
och införande av täthetsfaktorn ρ=mJ/(4πr3/3) ges
FsK = pJAK= πG(2πrr0ρ/3)2 = πG(2πr0ρ2/3[3mJ/4π]1/3 (1/3))2
TYNGDPUNKTENS
DEFINITION: cMAX
I en sfärisk
kropp med given massa är FsK exakt i varje ekvipotentialyta. Tätheten tagen efter
massan och den lokalt omslutna klotradien kommer alltid att avse g-styrkan i
klotytan, oavsett förhållandena innanför.
DEL VI SEKTION 3: g-statiska intrycket — grafrelaterade kraften — Detonationsimpulsens
gränslinjer
Ur
funktionsekvivalenten till F-integralen x/(1–x)=(1/x
– 1)–1 med FsK=kfxf (1/x – 1)–1ϖ–1 ges för x ekvivalenten för g-statiska
intrycket
———————————————
xsK = (kf xf /ϖFsK + 1)–1
....................... g-statiska
intryckets ekvivalent
———————————————
xsK definierar detonationsimpulsens yttre
gränslinje för hela K-cellen.
Vi observerar
att x ges relativt det matematiska xy-systemets enhet 1.
 T=2x/v
T=2x/v
Grafrelaterade
kraften FaG för en realt kärnmottryckande kraft F blir med statiska
g-kraften FsK som offset och F som den aktiva
deformationskraften
FaG = FsK + F
FaG kommer att avse eller avgränsa den aktuella
detonationsimpulsens gränslinje eller gränskurva.
Grafiska (enhetsmatematiska)
intrycket xa blir
xa = xsK + x
xa definierar detonationsimpulsens inre
gränslinje för hela K-cellen.
FaG bestäms genom att först beräkna FsK ur den lokala gravitationen.
DEL VI SEKTION 4: Allmänna samband, statiska och expansiva
I
beräkningarna av statiska g-kraften FsK för given ideal homogen täthet används med
fördel mellanledets ekvivalent FsK=πG(2πrr0ρ/3)2 från SEKTION 2 ¦ [‡].
Partiella
klotradien r kopplar direkt till divergenskoefficienten ϖ=(2–c/c0) via c enligt
STATISKA[‡]
r0c =
(3/8Gπρ)1/2c0 ;
cz=c0/2, rcz=r0c√1/2
c =
(c0/2)[1 – √2(r/r0c)2–1]
ϖ = 2 – (1/2)[1 – √2(r/r0c)2–1]
EXPANSIVA[‡]
r0c =
(3/2Gπρ)1/2c0 ;
cz=c0/2, rcz=r0c√3/4
c =
c0[√(r/r0c)2–1] ; rcz=r0c√3/4
notera
att sambandet för detta fall har teckenomvända rottermer
ϖ = 2 – √(r/r0c)2–1
Observera
GRÄNSMASSORNA GENOM EXPANSIVA-KONTRAKTIVA STATISKA
TILLSTÅNDETS G-FYSIK
att
•
sambanden gäller bara för centralmassor med egen divergenszon[‡] (allt större än 10STATISKA 80EXPANSIVA Solmassor)
• sambanden endast avser ϖ>2 (rSTATISKA-värden mindre än r0c/√2 OCH rEXPANSIVA-värden mindre än r0c ger negativ rot)
• divergensekvivalenten för c är
negativ i ϖ>2
För ϖ>2 med c=c0(2–ϖ) gäller för given centralmassa med homogen täthet distansen rSTATISKA från masscentrum till ekvipotentialytan för c
ur c
r =
r0c√[1+(1
– 2 · c · 1/c0)2]/2
Motsvarande
för rEXPANSIVA
är
r =
r0c√[1
+(c · 1/c0)2]
Med växande
negativ divergens c växer också r från masscentrum ut mot g-max.
DEL VI SEKTION 5: Impulsen
VÄRDET PÅ xa–xsK=x ÄR AVGÖRANDE för bestämningen av IMPULSEN som kärnan utvecklar då den
bildar rekylkraften. x är nämligen den enda distansfaktor kärnan
förfogar över för att bilda accelerationen i formåterställningen.
Syftet med fjäderanalogin är att finna svaret på frågan vilket realt x
som ger (kan förstås ge)
vilken real deformationskraft F i en viss ekvipotentialyta r i området ϖ>2. Med ovanstående genomgång kan svaret
formuleras
xsK+x = (kf xf /ϖ(FsK+F) + 1)–1
För att problemet ska vara meningsfullt för K-cellens
matematiska fysik, måste x sättas i någon koppling till området med
ϖ=1.
— Det är därifrån som tändningen ska komma, om vi har förstått
saken rätt.
— Vilken kraft motsvarar — då — intrycket x i
lokalen ϖ=1 (samma som K-centrum, idealt exakt i)? Svaret blir
x = (kf xf /F + 1)–1 ........ Det
motsvarar statiska tillståndets F=F(1/x – 1)–1
Med impulsen FT=p=m6,6T53v7,5T9=mKva0K=4,95
T63 NS @ 5
T63 NS som krävs för att ge K-cellen en expansion — som ENLIGT TNED
motsvarar värdena från observationerna via rödförskjutningen [‡R] — krävs minst ett
Fmin=p/T=p/(2x/v)=pv/2x=mv2/2x=Ekin/x=(1,85625 T73)/x.
Med impulsen FT=p=mKva0K som krävs för att expandera K-cellen krävs minst ett
Fmin=p/T=p/(2x/v)=pv/2x=mv2/2x=Ekin/x.
Ekin är den
rörelseenergi K-cellen samlat genom kontraktionen, kvantitativt densamma som K-cellens g-energi, idealt med avseende på
största utsträckningen Gm0K2/rKmin.
x
motsvarar den distansekvivalent som accelerationen 0 till v ska
genomföras på. Litet x kräver stort F, större x nöjer sig med
mindre F.
Observera
att fristående x i sambanden ovan refererar till xy-systemets enhet 1. I
metriska ekvivalenter måste x multipliceras med dmax=xf.
EXPANSIONSHASTIGHETEN[‡] v=r√(8πρ/3) ger:
Rörelseenergin för varje ekvipotentialyta med radien r i K-cellen genom
K-cellens totalmassa m0K och maxtätheten ρ
ges enligt
Ekin = mv2/2
= mr2(4πρ/3)
;
Ekin = m0Kr2(8Gπρ/3)/2
= m0Kr24Gπρ/3 ;
Parentesformen
är densamma som faktorn i statiska tillståndets fysik SEKTION 4. Den
här angivna formen för Ekin gäller i vilket fall då det bara kan finns en rörelseenergi för hela
komplexet.
FÖR ANALYSENS
DEL noterar vi att rörelseenergi kan förstås med sin kvantitet obegränsat
näraliggande klonktillfället då, idealt, K-cellens samtliga atomkärnor stöter
ihop. Exakt samma mängd ges sedan tillbaka genom den resulterande detonationen.
Idealt och enkel sett, alltså en ren ideal fullkomligt elastisk studs.
DEL VI SEKTION 6: Slutformen, detonationssambandet
OM VI FÖR
SAMTLIGA FALL ansätter ett absolut minsta statiskt F0=Ekin/(xf=dmax)
xsK+x = (kf xf /ϖ(FsK+F0) + 1)–1 = xa
erhåller vi
x =
xa–xsK
med
xsK = (kf xf /ϖFsK + 1)–1
FsK =
πG(2πrr0ρ/3)2.
Insättes x
i
Fmin = Ekin/x
från SEKTION 5 erhålles alltså ett nytt,
dynamiskt Fmin
som varierar med ϖ
och som omtalar vilket lokalt bidragande Fmin i aktuell ekvipotentialyta som minst krävs
för att uppfylla det allmänna F0=Ekin/xf.
Därmed har vi
slutfört beskrivningen av de nödvändiga matematiska delar som krävs för att
kunna beskriva K-cellens detonation ur enklast tänkbara förutsättningar.
Sambandsformerna
blir
Detonationsimpulsens yttre gränslinje:
G-offset ................... xsK =
(kf xf /ϖFsK + 1)–1
Detonationsimpulsens inre gränslinje:
x+G-offset
............... xa =
(kf xf /ϖ(FsK+F0) + 1)–1
Detonationsimpulsens gränskurva eller detonationssambandet:
x =
xa–xsK
x definierar gränskurvan för K-cellens detonationstransient.
Detonationens
reella kurva kommer att ligga mellan x och funktionens r-axel.
Detonationstransienten beskriver området där K-cellens neutroner
bildar maximala deformationen som utlöser detonationen.
Det betyder
alltså ett motsvarande deformationsområde inom vilket K-cellen kan komprimeras
på detonationsenergin.
— Som vi ser
av graferna, tillåts praktiskt taget ingen deformation x alls i
K-cellens centrum och periferi.
—
Deformationszonen ligger inuti K-cellen, i stort omkring 7,5 T8 M utanför
centrum (dmax=r0n/1000), alltså en rejäl bit utanför c=0-gränsen
— men likväl bara vid en tusendel av K-cellens radie.
2004XI4
ALLMÄNT FÖR
BERÄKNINGARNA
FORMSTYRKAN
FÖR PROTONEN är med hänsyn till den lilla massdefekten (1,5e) och
elektronens frisläppande ur neutronen marginellt skild från neutronreferensen.
I denna grova översikt betraktas denna skillnad som oväsentlig då principen för
atomkärnans formstyrka i vilket fall står klar. Vi kan därmed obehindrat
tillämpa de givna sambandsformerna på hela K-cellen genomgående (med vissa
reservationer) då uppgiften i denna framställning endast är att få en
approximativ kvantitativ översikt.
Graferna i
denna presentation är beräknade från cz=c0/2-gränsen och utåt då x-värdena i
vilket fall (även med dmax=r0n/1) inte har några distinkt skilda värden från
— i princip — noll strax utanför cz-gränsen.
END.
NOTERING — dokument:
— Typografiska Skarvarna mellan MsWORKS 4.0, WORD 2000 och Webbläsarna:
EFTER ÖVERFÖRING och justering med Ctrl + ++ som gör
nedsänkta/upphöjda Synligt Läsbara i WORD — FRÅN MsWORKS 4.0:
EFTER IMPORT TILL WORD FRÅN WORKS:
![]()
IMPORTEN I WEBBLÄSAREN
![]()
:
Jättekul: Förrädiskt, man ser inte, direkt — särskilt inte i efterhand sedan lång tid gått — vad som är vad med mer än man parallell-läser från webbläsaren.
— Speciellt upphöjningar (kolla Q2) — snygga i WORD — men katastrof i webbläsaren
![]()
dras ner i webbläsaren: kontexten förloras.
SÅ FÅR MAN I EFTERHAND PLÖJA I STORT SETT »ALLTIHOPA IGEN» FÖR ATT RÄTTA TILL TYPOGRAFIN PÅ AVSEDD FORM — men många (många) ställen har missats — och många (många) har korrigerats i efterhand.
Många sådana rent typografiska efterhandsjusteringar har gjorts i dokumenten allt sedan Internetintroduktionen för Universums Historia från Aug2008 — och fel hittas fortfarande 2019(+).
2004-10-22 Fjäderanalogin.wps
Ursprungets
HÄRLEDNING FRÅN KRAFTLAGEN
DEL I ¦ DEL II ¦ DEL III ¦ DEL IV ¦ DEL V ¦ DEL indexVI ¦ DEL VI
—————————————————————————————————————————————
Härledning
från kraftlagen — Den
sammanhängande FYSIKBESKRIVNINGEN uteslutande ENLIGT TNED
—————————————————————————————————————————————
Inledning
I NEGATIV
DIVERGENS[‡]
förskjuts atomkärnans formbevarande styrka inåt i den fraktala ytstrukturen.
Det sker genom den kraftbaserade divergensreduktion, enligt kraftvektorledet
Fc0
– Fc – FG
= 0 ............. vektorekvivalenterna mot FG utbildar negativa Fc
som den starka
gravitationen åstadkommer, och som garanterar att naturkonstanten c0 bevaras orörd. Vi noterar som tidigare
— LJUSHASTIGHETENS
BEVARANDE OBEROENDE AV GRAVITATIONENS INVERKAN —
att negativa
ljushastigheter inte existerar. Men kraftdynamiken med negativ divergenskraft
gör det definitivt[‡]
i enlighet med bevarandet av Fc0 med sina tillhörande ekvivalenter. För att
kunna härleda sättet på vilket K-cellen reagerar vid kontraktionsfasens slut,
då avståndet mellan alla individuella neutronytor blir idealt noll och hela
K-cellens neutronmassa »klonkar ihop i ett enda slag»[‡] måste vi genomföra en matematisk
djupdykning i atomkärnans formfysik. Resultatet ska visa hur, och var, K-cellen
detonerar — i detalj — om TNED avspeglar korrekt naturuppfattning.
DEL I: Atomkärnans formstyrka ϑ — grek. theta (J),
gränsläget för kärnans deformation
[Inledande
illustration TNED109B.BMP. Samband s47]
Från Atomkärnans
härledning[‡] relaterade vi massans definition alternativt
på formen
m=m=ma/a=F/a.
Betrakta från
härledningen av elektriska kraftlagen eller divergenskraften dess form
F=k(Q/r)2 med k=Rc=R0c0= (reciproka) elektriska konstanten ca 9 T9 VM/C.
En obegränsad
delning av Q och r, eller alternativt en obegränsad delning av Q2 och ytan A, via faktorn (n→∞)
enligt
F=k(Q/r)2=k([Q/(n→∞)]/[r/(n→∞)])2=k(Q/r)2
beskriver
exakt principalpartikeln (Se Potentialbarriären[‡]) i atomkärnans fraktalstruktur, den som
oupphörligt delas utan att någonsin komma till noll och därför aldrig återfinns
som någon partikel. Kraften F uttrycker eller bevarar alltså en inneboende formstyrka i
atomkärnan via massan enligt
m = F/a = F/(c/dT) = FdT/c
= k(Q2/A)(dT/c)
= Rc([m/R][A/dT]/A)(dT/c)
= m
Eftersom r-formen
redan är återförd på minsta möjliga avståndsformen r/(n→∞),
kan atomkärnan omöjligen fullständigt komprimeras, skjutas sönder eller på
annat sätt förstöras på mekanisk väg; den kommer att svara med en exakt lika
stor motkraft enligt ekvivalenten F=k(Q/r)2 genom att r tvingas mot 0, R0c0Q givna och konstanta.
Vi behöver här inte ta någon som helst hänsyn
till gravitationens inverkan
eftersom, som vi har sett,
— LJUSHASTIGHETENS
BEVARANDE OBEROENDE AV GRAVITATIONENS INVERKAN —
gravitationen
garanterar att c0
bevaras intakt genom kraftvektorledet
Fc0
– Fc – FG
= 0 ...... vektorekvivalenterna
mot FG utbildar
negativa Fc
Kraftvektorledet
ingår redan av princip i atomkärnans struktur (Atomkärnans härledning[‡]). Samt att rymdmotståndet R0 är givet som grund för c0 och därför heller inte påverkas av
gravitationen. Atomkärnans formstyrka är alltså garanterad i vilket fall oberoende
av gravitationens inverkan.
— Det enda vi
behöver göra för att få fram en användbar matematisk fysik för att kunna
beskriva kärnans formstyrka med tillhörande dynamik blir — så endast —
att införa ett tryckstopp (dmax) motsvarande en gränslängd för kärnans
motsvarande axiella intryckning: Gränslängden d(MAX) kan aldrig uppnås
eftersom kraften i dess närmande redan är ställd på oändligt, som ovan:
exakt lika stor motkraft enligt ekvivalenten
F=k(Q/r)2 OM r tvingas/komprimeras mot 0,
R0c0Q givna och konstanta
Det är alltså
uppenbart att dmax > 0, visst och bestämt. Vi ska här också beteckna
den avgörande gränslängden med termen xf : formgränsstoppet.
xf = dmax
............................... formgränsstoppet,
gränslinjen för atomkärnans axiella ihoptryckning
Atomkärnans bevarande formkraft kan då återföras på en fast och fix grundkonstant, en
ϑ = F = k9T9(Q/xf )2
............. formfaktorn
Theta (grek. J)
i följande
mekaniska fjäderanalogi (ϑ, Grekiskans J).
— I mekaniken
gäller enkla praktiska
experiment med med stångvirad metalltråd om inte annat att kraften
på en fjäder följer formen
F=kd
med k som fjäderkonstanten och d som intrycket.
Styrkan i atomkärnans formhållfasthet kan som ovan nämnts återföras på
STRUKTUREN ¦ PASTOM
I hela dess samlade laddningsinnehåll Q=Z(1818e+18e–mD) genom uppdelningen i ±β-komponenterna tagna över kärnans maximala
ihoptryckning eller deformationsmaximum (dmax=xf). För neutronen
med massdefekten noll gäller
Q = 918e
~= (1818 + 18
+ 2,624)e = ± (2× 918e + REST[1,312]e)
DEN
FORMBEVARANDE Styrkan (kf) återförs på den konstanta divergenskraften
eller formfaktorn
F=k9T9(Q/xf )2 över
deformationen xf enligt F/xf=kf=k9T9Q2/xf3.
kf konserveras av atomens allmänna impulsmomentsekvation J0K+3J1K=0 där som tidigare noterats negativ divergens
ingår enligt
Fc0 – Fc – FG = 0 ............. vektorekvivalenterna mot FG utbildar negativa Fc
kf motsvarar den mekaniska fjäderkonstanten, kf = F/xf.
DEL II: Atomkärnans axiella deformation
FUNKTIONEN VI
SÖKER måste uppfylla villkoret att ju större deformationen blir mot
gränsstoppet xf=dmax, destor brantare och tvärare blir kraftens ändring
med avseende på intrycket (x), ehuru en linjär funktionsform som går mot
oändligt är utesluten inom ett avgränsat funktionsintervall (xf=dmax=1). Funktionen måste alltså tvunget bli
exponentiellt betingad. Eftersom kraftformerna i atomkärnan ytterst vilar på ytformer
(av sammansatt fraktal natur [‡P]¦[‡A] ) måste kraftändringens funktion återföras på
en yta som — därmed — kan avspeglar hela kärnformens yttre deformation.
— Enklaste här
kända sättet blir att återföra en
DEFORMATIONSKRAFTENS
VARIATION dF/dx=F’= F f (x)
inom
intervallet xf=dmax på divergenskraftens variation genom
inverterade kvadraten på resten mellan tryckstoppet dmax=1 och intrycket x enligt f (x)=1/(1–x)2. Nollavstånd för divergenskraften betyder då
”oändlig kraft” vilket här motsvarar fallet x=1 — som aldrig
uppnås. Därmed är villkoret med expontentialformen uppfyllt.
Varianten
F’=dF/dx=ϑ(1–x)–2 ger då integralen F via
differentialekvationen
dF =
ϑ(1–x)–2 dx
;
F = ϑ ![]() (1–x)–2 dx
(1–x)–2 dx
= ϑ(1–x)–1 ;
F(0) = ϑ ; bestämda
integralen
blir:
F = ϑ(1–x)–1 – ϑ
= ϑ[(1–x)–1 – 1]
= ϑx/(1–x)
= ϑ[1/x – 1]–1
Av mellanledet
ϑx/(1–x) ser vi att x-formen är helt numerisk, den
kan ersättas med
x/(1–x)=dmaxx/dmax(1–x). Dvs.;
ENHETSFORMEN
för x-variationen mellan 0 och 1=dmax har reala metriska distansen dmax eller med samma innebörd xf. Deformationen dämpas absolut av formstyrkan kf. Med dessa konstanta koefficienter ges då realt metriskt
F =
kfxf x/(1–x)
= F x/(1–x) ....................................... atomkärnans axiella deformation:
grundform
utom gravitationens inverkan
DEL III: Deformationens allmänna ekvation — gravitationens divergensreducerande
inverkan
Vid en visst
given lokal divergens[‡]
f (c) svarar ett visst kärnintryck f (x)
mot en motsvarande kärnmotkraft eller en deformationskraft F,
intrycket (x) = motkraften (F)
....................... allmänna,
kvalitativa grundmekaniken
Formfaktorn F[‡] är atomkärnans kraftbevarande konstant [F=k9T9Q2/xf2]. För given divergens bestämmer F intryckets magnitud. Motkraften å sin sida
beror också dynamiskt just av en divergensfunktion f (c)
så att vi för samtliga fall kan teckna upp ett motsvarande mera fullständigt
sambandsled enligt
intrycket · formfaktornKONSTANT = kärnmotkraften · divergensen ;
f(x)F =
Ff(c) ;
f(x)/f(c) =
F/F .................................... fullständiga (Gravitella) funktionsformen
Som DEL II
vi redan studerat, är intryckets funktion en inverterad formbevarande
ytfunktion för atomkärnan,
f (x)
= 1/A = 1/(1–x)2
Enheten 1 i
tryckanalogin motsvarar atomkärnans enhetsyta med referens till intryckets
maxvärde xf=dmax i formstyrkan F=ϑ.
DEL IV: Divergenskoefficientens funktion — gravitationens inverkan
Divergensens
funktion bildar en divergenskoefficient
v, bokstaven v i Symbol —
sammansatt av lilla omega och toppdelen på pi här improviserat som
»PiOm»:
— OM Pi
försöker Trycka ner Omgivningen, reser den sig, okuvligt. (.. författaren bara
improviserar ... )
som gäller vid
varje given g-kraft. Vi kan lösa ut den funktionen f(c) genom att
betrakta fallet där divergensen inte har någon KONTAKTERANDE inverkan på
tryckanalogin. Nämligen där f(c)=1, analogt där det gäller att c/c0=1, dvs., i K-cellens centrum[‡].
Funktionen för f(c) ska i vilket fall vara kontinuerlig mot detta
nollställe. Lösningen till f(c) ges då enligt leden och utvecklingarna
(F/F)f (x)=1=f (c)
; E=E0 ;
E = 2E0
– E0 f (c) .......................... med f(c)=1 ges E=E0 vilket motsvarar orörd kärna
E = E0[2– f (c)] = PT = P0T[2– f
(c)] ; E = mad = Fd = Pt ; P = Fd/t = Fv; v = c:
P = P0[2– f (c)] = Fc = Fc0[2–
f (c)] ;
c/c0 = 2– f (c) ;
f (c) = 2–c/c0 = (F/F)f (x) ;
ϖ = 2–c/c0
......................................... ; .................. divergenskoefficienten
DEL V: Deformationskraftens fullständiga samband
Av ovanstående
följer
F = F f(x)/f(c) = F f(x)/ϖ ;
Fx = E
= F f(x)/ϖ
x ;
f(x) = 1/A = 1/[1–x]2 ;
dE/dx = F (1/[1–x]2)/ϖ ;
dE = F (1/[1–x]2)/ϖ dx ;
E = F (x/[1–x])/ϖ · 1M ;
F = F x/[1–x]ϖ
........................................................... atomkärnans uppförande vid axiell
deformation x, F=k9T9Q2/xf2
F-ekvivalenten
beskriver deformationssambandet.
x relaterar metriskt till enhetsvärdet 1 för xf=dmax.
Toppdivergensen c=c0 ger v=1, nolldivergensen ger v=2, samt vidare positivt uppåt obegränsat med
växande negativ divergenskraft Fc. Växande v
dämpar alltså F — men gör samtidigt F-variationen brantare så att stora
variationer i F ges på allt mindre variationer i x.
— Se Typgraf TNED141A.BMP.
Sektioner 1-6
DEL VI: Deformationskraftens tillämpning på K-cellen, Detonationssambandet — statiska g-trycket och statiska g-kraftens
inverkan
forts. DEL VI.
;
DEL VI SEKTION 1: Det passiva kärnyttrycket från den negativa divergensen
FJ/AJ=pJ=FK/AK
pJ = mJ a/4πr2 = mJ(GmJ/r2)/4πr2
DEL VI SEKTION 2: Statiska g-kraften, statiska g-trycket
FsK =
pJAK = kfxf x/(1–x)ϖ ................... statiska g-kraften
pJ =
FKcell/AKcell = FKärna/AKärna
....... statiska g-trycket, gäller
exakt i varje ekvipotentialyta
DEL VI SEKTION 3: g-statiska intrycket
— grafrelaterade kraften
xsK = (kf xf /ϖFsK + 1)–1
....................... g-statiska
intryckets ekvivalent
DEL VI SEKTION 4: Allmänna samband, statiska och expansiva
r0c = (3/8Gπρ)1/2c0
r0c = (3/2Gπρ)1/2c0
DEL VI SEKTION 5: Impulsen
FT=p=mv
DEL VI SEKTION 6: Slutformen
Detonationsimpulsens yttre gränslinje:
G-offset ................... xsK =
(kf xf /ϖFsK + 1)–1
Detonationsimpulsens inre gränslinje:
x+G-offset
............... xa =
(kf xf /ϖ(FsK+F0) + 1)–1
Detonationsimpulsens gränskurva:
x
= xa–xsK
TILLÄGG 3Feb2019 — originalets text 2004
N-minimum i dMAX
——————————————————————
NOTERA SKILLNADEN MELLAN MASSTALET 1 OCH DE ÖVRIGA FRÅN 2 —
se »DEUTERONENS
HEMLIGHET»
——————————————————————
ORIGINALTEXTEN från 20Apr2004 innehåller relativt omfattande resonemang med
utvärderingar och utvecklingar som komprimerades på kortform i (Masstalet 1)
ATOMKÄRNANS
EKVIVALENTA GEOMETRI VID DEFORMATION. Här ges en mera
uttömmande grundbeskrivning som förklarar ansatserna i beskrivningssättet:
Atomkärnans impulsmoment[‡]
J0K + 3J1K = 0:
Se särskilt i PLANCKRINGEN
och ANTALET
MASSELEMENT I ELEKTRONEN
Det angivna N(min) = 1000 baseras på ett sämsta faller SÄKRA marginalvärde som (garanterat) INTE äventyrar en övre maxgräns för atomkärnans elastiska deformation — så att vi inte räknar på helt galna grunder. Men grovräkningen vill snarare sätta det gränstalet till runt N(min) = 20.000: atomkärnas obotligt stränga ovilja mot att deformeras utan att splittras.
En del av resonemanget i avsnittet[‡] ATOMKÄRNANS EKVIVALENTA GEOMETRI VID DEFORMATION ansluter till den — här — kompletterande illustrationen ovan:
— Sämsta fallets grovberäkning med FRAKTALNIVÅERNA i N3m20-aggregatet[‡] Neutronen visar en närmast »möjlig elastisk fraktalnivå» vid underfraktal No4 (R0/2100 i figuren ovan).
— Räknar vi emellertid i NETTO på varje första underfraktals ring med sina 612 elektronmassor, totalt (1836+2,64)e för hela neutronen, visar den symmetriska geometriska cirkulära delningen ett maxvärde på drygt 97:
tan(360/612) = 1/97,39940293
~ 97,4
Vi VET emellertid inte säkert vad som gäller i atomkärnans fall — utöver vad TNED anvisar för toppspinnet och de två första underfraktalerna. Det ligger — emellertid — också i sakens natur ATT den geometriska delningen — tvunget — MÅSTE ha kredit på kärnfysiken i praktiken för att kärimpulsmomentets balansekvation J0K + 3J1K = 0 ska gälla:
— ENDAST då kärnan exciteras — börjar självsvänga vilket framalstrar de invävda ±e-krafterna med explosiv verkan — bryts impulsmomentets balansekvation, analogt tyngdcirkelns naturliga fluktuationer omkring elasticitetsgränserna.
Så: Delningsformen cotan360/[(1818+18+2,64)e/3 = 612+k]~97 kan inte ignoreras: Det anger det absolut lägsta fraktaldiametrala värdet för andra underfraktalen — som garanterar den större (No1) underringens elektromagnetiska sammanhållning enligt förutsättningarna i PLANCKRINGEN (Atomkärnans härledning).
— Med en vidare hoftning på att nästföljander fraktalnivås motsvarande ringdiameter är MAX hälften — vilket också bör vara en STOR överdrift — ges så en mera praktiskt rimlig N(min)-gräns vid R0/([97~100]·200) = 20 000.
— Det är den först ringnivå vars ØNo4 som rent geometriskt i princip kan verkställa en variation hos en toppringsdiameter ØNo1=FörstaUnderfraktalen genom att pack-avstånden mellan närliggande ØNo4 ökar — aldrig minskar. Och där ligger hela det eftersökta KRITERIET i jakten på ett rimligt referensvärde för atomkärnans — neutronens i detta fall — elasticitetsgräns: gränsen då kärnas mekanik säger ifrån och börjar ge tillbaka intrycket;
Nmin = R0/20.000
snarare än det tidigare antagna sämsta fallets grovvärde R0/1000.
EMELLERTID har det redan strängt lilla (1/1000) försumbara intrycksvärdet mindre betydelse rent kvantitativt sett än rent kvalitativt sett. Det avgörande viktiga i härledningen till K-cellen detonationsfysik är i vilket fall ATT något (litet) gränsvärde existerar, och som kan PÅTRIGGA detonationstillfället avgörande mekanik. Så, behöver vi inte, längre, slita oss förtvivlade med den frågeställningen då nu principen står fullkomligt klar.
INNEBÖRDEN för de bägge illustrerade[‡] olika deformationssätten för atomkärnan blir då också mindre dramatiska EFTERSOM det som gäller, i vilket fall, är att OM den uppskattade fraktaldifferensen (R0/20.000) vid ØNo4 bryts upp — och atomkärnorna/atomkärnan sönderfaller, eller försöker göra det, befinner vi oss i vilket fall VID gränsen då atomkärnan ger tillbaka samma kraftsvar som det som föranledde intrycket: atomkärnan i höggravitella lokaler med c=0 har ingen elektromagnetisk makrobaserad förlustfaktor att ta hänsyn till: atomkärnan är förlustfri, och därmed 100% elastisk i gensvaret på varje MEKANISK STÖT som kärnan utsätts för; Det finns inga elektromagnetiskt termiska värmeförluster så länge atomkärnan befinner sig i en c=0-lokal: K-cellens detonation.
END.
COMPILATION COMPLETED 1Feb2019
3Dgeometrin
innehåll: SÖK äMNESORD på denna sida Ctrl+F · sök ämnesord överallt i SAKREGISTER
3D-Matematiken
ämnesrubriker
innehåll
DEL 6 Deformationskraftens
tillämpning på K-cellen, Detonationssambandet — statiska g-trycket och statiska
g-kraftens inverkan
SEKTION 1 Det
passiva kärnyttrycket från den negativa divergensen
SEKTION 2 Statiska
g-kraften, statiska g-trycket
SEKTION 3 g-statiska
intrycket — grafrelaterade kraften
SEKTION 4 Allmänna
samband, statiska och expansiva
SEKTION 5 Impulsen
SEKTION 6 Slutformen
DEL 1 Atomkärnans
formstyrka ϑ
DEL 2 Atomkärnans
axiella deformation
DEL 3 Deformationens
allmänna ekvation — gravitationens divergensreducerande inverkan
DEL 4 Deformationskraftens
fullständiga samband — Divergenskoefficientens funktion — gravitationens
inverkan
DEL 5 Deformationskraftens
tillämpning på K-cellen, Detonationssambandet — Deformationskraftens
fullständiga samband
referenser
[HOP].
HANDBOOK OF PHYSICS, E. U. Condon, McGraw-Hill 1967
Atomviktstabellen i HOP allmän
referens i denna presentation, Table 2.1 s9–65—9–86.
mn =
1,0086652u ...................... neutronmassan
i atomära massenheter (u) [HOP Table 2.1 s9–65]
me =
0,000548598u .................. elektronmassan
i atomära massenheter (u) [HOP Table 10.3
s7–155 för me , Table 1.4 s7–27 för u]
u = 1,66043 t27 KG .............. atomära massenheten [HOP Table 1.4 s7–27,
1967]
u = 1,66033
t27 KG .............. atomära massenheten [ENCARTA 99 Molecular
Weight]
u = 1,66041 t27 KG
............... atomära massenheten
[FOCUS MATERIEN 1975 s124sp1mn]
u = 1,66053886 t27 KG ........ atomära
massenheten [teknisk kalkylator, lista med konstanter SHARP EL-506W
(2005)]
u = 1,6605402 t27 KG .......... atomära
massenheten [@INTERNET (2007) sv. Wikipedia]
u = 1,660538782 t27
KG ...... atomära massenheten [från www.sizes.com],
CODATA
rekommendation från 2006 med toleransen ±0,000 000 083 t27 KG (Committe
on Data for Science and Technology)]
c0 = 2,99792458 T8 M/S ........ ljushastigheten
i vakuum [ENCARTA 99 Light, Velocity, (uppmättes i början på
1970-talet)]
h = 6,62559 t34 JS ................. Plancks konstant [HOP s7–155]
—
Det internationella standardverket om universum sammanställt vid universitetet
i Cambridge, The Cambridge Encyclopaedia of Astronomy, London 1977.
[BKL]. BONNIERS KONVERSATIONS LEXIKON, 12
band A(1922)-Ö(1928) med SUPPLEMENT A-Ö(1929) — ALBERT BONNIERS FÖRLAG
STOCKHOLM
t för 10–, T för 10+,
förenklade exponentbeteckningar
MAC,
här ofta använd förkortning för Modern ACademy versus the comparing TNED
— etablerad vetenskap sedan början av 1800-talet
TNED — Related PHYSICS And MATHEMATICS —
Se särskild djupbeskrivning av innebörden i begreppet relaterad framställning.

![]()


(Toroid Nuclear Electromechanical Dynamics), eller Toroidnukleära Elektromekaniska
Dynamiken är den dynamiskt ekvivalenta resultatbeskrivning som
följer av härledningarna i Planckringen h=mnc0rn,
analogt Atomkärnans
Härledning. Beskrivningen enligt TNED är relaterad, vilket innebär: alla,
samtliga, detaljer gör anspråk på att vara fullständigt logiskt förklarbara och
begripliga, eller så inte alls. Med TNED förstås (således) också
RELATERAD FYSIK OCH MATEMATIK. Se även uppkomsten av termen TNED
i Atomkärnans Härledning.
SHORT ENGLISH —
TNED in general is not found @INTERNET except under this domain
(Universe[s]History, introduced @INTERNET 2008VII3).
TNED or Toroid
Nuclear Electromechanical Dynamics is the dynamically equivalent resulting
description following the deductions in THE PLANCK RING, analogous AtomNucleus’
Deduction. The description according to TNED is related,
meaning: all, each, details claim to be fully logically explainable and
understandable, or not at all. With TNED is (hence) also understood RELATED
PHYSICS AND MATHEMATICS. See also the emergence of the term TNED in AtomNucleus’
Deduction.
Senast uppdaterade version: 2019-12-04
*END.
Stavningskontrollerat SVENSKA 2008-11-02 | 2008-11-06 | 2011-10-11 | 2019-02-08. ÅrMånDag.
Stavningskontrollerat ENGELSKA 2019-02-07.
rester
*
åter till portalsidan ·
portalsidan är www.UniversumsHistoria.se
![]()
![]() ∫ √ L τ πρ ħ
ε UNICODE — often used charcters in mathematical-technical-scientifical
descriptions
∫ √ L τ πρ ħ
ε UNICODE — often used charcters in mathematical-technical-scientifical
descriptions
σ
ρ ν ν π τ γ λ η ≠ √ ħ
ω → ∞ ≡ ↔↕ ħ ℓ
Ω
Φ Ψ Σ Π Ξ Λ Θ Δ
α
β γ δ ε λ θ κ π ρ τ φ
σ ω ∏ √ ∑ ∂ ∆ ∫ ≤ ≈
≥ ← ↑ → ∞
↓
ζ
ξ ϑ
Arrow symbols, direct via Alt+NumPadKeyboard: Alt+24 ↑; 25
↓; 26 →; 27 ←; 22 ▬
23
↨ — also 18 ↕; 29 ↔
Alt+NumPad 0-25, 26-...
☺☻♥♦♣♠•◘○◙♂♀♪♫☼►◄↕‼¶§▬↨↑↓
→←∟↔▲▼
!”#$%&’()*+,-./♦812...
*
PNG-justerad 2011-10-10
åter till portalsidan ·
portalsidan är www.UniversumsHistoria.se